
:quality(80)/p7i.vogel.de/wcms/d0/5f/d05f5168783fa5a748f58d476afe1420/0130417390v1.jpeg "Freudenberg aus Weinheim in Baden-Württemberg hat im letzten Jahr Entscheidungen treffen müssen, die den möglichen Gewinn für das Jahr 2025 drastisch schmälerten. Hier mehr dazu ... (Bild: dpa)")
:quality(80)/p7i.vogel.de/wcms/64/31/6431bb9678e214bd9652a13237e3ba17/0129733089v1.jpeg "Um die Rüstzeiten bei seinen Langdrehern zu verkürzen und produktiver zu arbeiten, setzt Stork auf das modulare Neoswiss-Drehsystem von Iscar. (Bild: Iscar)")
:quality(80)/p7i.vogel.de/wcms/6e/cf/6ecf2fb0ee04c7d1ef68bad454c55bc1/0130416948v1.jpeg "Am 12. März hat die Verbundwerkstoff-Messe JEC World in Paris für gut ein Jahr wieder die Tore geschlossen. Der Veranstalter JEC Group blickt auf, wie es heißt, auf ein erfolgreiches Event zurück. Hier einige Eckdaten ... (Bild: A. Emmanuelle Thion)")
:quality(80)/p7i.vogel.de/wcms/4a/ed/4aedcf659ecbf550a3e915b51b7cdf2a/0130415697v1.jpeg "Das waren die Gewinner vom Wettbewerb Grinder of the year 2024. Und weil die Schleiftechnikmesse Grindinghub alle zwei Jahre in Stuttgart stattfindet, wird es den Goty auch bei der kommenden Ausgabe der Messe Anfang Mai geben ... (Bild: Kskomm)")
:quality(80)/p7i.vogel.de/wcms/33/98/339810f9a8890b15cb2abc5d88c1ce07/0130418636v1.jpeg "Cellcentric ist ein Joint Venture der Volvo Group und Daimler Truck. Es geht um nicht weniger als die Dekarbonisierung des Schwerlastverkehrs und anderer Aspekte dieser Art. Und zwar durch das Pushen der Wasserstofftechnik. Nun ist auch Toyota ins Boot gekommen ... (Bild: Cellcentric)")
:quality(80)/p7i.vogel.de/wcms/68/28/682858b142c70f4b955a4994fd9c1573/0128917299v2.jpeg "Vielversprechende KI Use Cases lassen sich am besten mit einem strukturierten Ansatz identifizieren. (Bild: © Pakorn - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/bf/c0/bfc0473f801351f0a155aac73ebecf0a/0130364594v1.jpeg "Schon vor wenigen Monaten musste an den Thyssenkrupp-Steel-Standorten Isbergues und Gelsenkirchen die Produktion von Elektrostahl ausgesetzt werden. Nun trifft es das französischen Werk erneut, weil die Menge an viel zu billigem Asienstahl die Geschäfte ausbremsen, heißt es. (Bild: Thyssenkrupp Steel)")
:quality(80)/p7i.vogel.de/wcms/7f/2a/7f2a2d642614628e0de3e7b28a51fbe1/0130171910v2.jpeg "Mithilfe eines digitalen Zwillings der Anlage und künstlicher Intelligenz steuert sich die Bon-Presso-Kaffeerösterei teilweise selbst. (Bild: Schwarz Produktion / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/17/9a/179a34c74ad491aa8e85f1a13a5ea739/0130368728v3.jpeg "Rainer Ostermann zeigt, wie Festo seine Kunden mit der digitalen Customer Journey, also über digitale Tools, über den gesamten Lebenszyklus einer Maschine hinweg begleitet. (Bild: Maximilian Lottmann)")
:quality(80)/p7i.vogel.de/wcms/83/25/83259a5ffde73843f1f95f707947a1ca/0130222364v2.jpeg "Sub-D-Stecker kommen immer dann zum Einsatz, wenn viele Leitungen zuverlässig kontaktiert werden müssen. (Bild: Harting)")
:quality(80)/p7i.vogel.de/wcms/62/ec/62ecd085cb7fe3bcbdd4e75097322141/0130420618v2.jpeg "Optimal ausgelegt für thermisch anspruchsvolle Anwendungen in der Industrie sind die Hochtemperatur-Faltenbälge von Höhl & Westhoff. Sie sind temperaturbeständig bis etwa 850 °C. (Bild: Höhl+Westhoff)")
:quality(80)/p7i.vogel.de/wcms/f4/a8/f4a87f848ce92e6255a094e9f264ef8c/0130134267v1.jpeg "Dank der Unterwasser-Ultraschallanlage wird Cogne auch den höchsten Qualitätsanforderungen kritischer Industrien gerecht. (Bild: Cogne)")
:quality(80)/p7i.vogel.de/wcms/67/2e/672eadcd2d7a8c77591a84eeab1bdedd/0113143253v7.jpeg "In unserem China Market Insider versorgen wir Sie regelmäßig mit relevanten Informationen direkt aus China. (Bild: © Eisenhans - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/b8/56/b85699de489a69c886c6ff1be90a8771/0130006560v2.jpeg "In der ersten Folge des Industrial Benchcast erzählt Bastian Ballmann von Koenig & Bauer wie ein interdisziplinäres Innovationsteam ohne IT-Experten ein fertigungsübergreifendes Cockpit entwickelt hat. (Bild: MM Maschinenmarkt)")
:quality(80)/p7i.vogel.de/wcms/02/7a/027abff116f49f61da9b78d2ec51becf/0130306097v2.jpeg "Beschlossen die Partnerschaft auf der Logimat (v.l.): Michael Reicheicher (CEO Safelog), Hans Krattenmacher (CTO SEW-Eurodrive), Michael Wolter (CEO Safelog) und Mathias Behounek (CEO Safelog). (Bild: Safelog)")
:quality(80)/p7i.vogel.de/wcms/88/ee/88ee44d58d2ea5c2129715dfab3a612f/0130416437v2.jpeg "Schaeffler wird Zulieferer des Formel-E-Teams Jaguar TCS Racing. (Bild: Jaguar TCS Racing)")
:quality(80)/p7i.vogel.de/wcms/12/70/1270feef6a19c28a9bea9c66245efe2a/0130364957v1.jpeg "Für die derzeit am finanziellen Tropf der Landespolitik hängenden Domo-Chemicals-Standorte in Leuna und Premnitz wird wohl in Kürze das Insolvenzverfahren eröffnet. Denn ein Investor hat sich bisher nicht gefunden ... (Bild: Domo Chemicals)")
:quality(80)/p7i.vogel.de/wcms/a5/a0/a5a06e3b6bb43a1750be9fe8629fc75f/0130357877v1.jpeg "Der Laser als Werkzeug bewegt die Welt. Ganz brandheiß ist der Trend hin zu Multi-Kilowatt-Lasern. Dieser wird deshalb auf dem AKL’26 vom 22. bis 24 April 2026 in Aachen umfassend thematisiert, wie das Fraunhofer ILT vorab informiert. Hier mehr zur neuen Ära der Lasertechnik. (Bild: Fraunhofer ILT)")
:quality(80)/p7i.vogel.de/wcms/54/11/541125b2d206c7532437b6bf0a98b6de/0101144676v2.jpeg "Welche Messen finden 2025 statt? Wir geben Ihnen einen Überblick. (Bild: © Robert Kneschke - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/48/5c/485cf545f728e4b0164b832dae7f63ec/0109052935.jpeg "Beachtet man ein paar einfache Regeln, tritt man in Videokonferenzen noch professioneller auf. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/96/9e/969e5b78fe8a0ba6088913a107471566/0109295155.jpeg "So entwickelte sich das Innovationsgeschehen bei dem deutschen KMU im Verlauf der Coronakrise. (Bild: IFM)")
:quality(80)/p7i.vogel.de/wcms/ca/20/ca20f03bcb7e0b46d69495ad92782048/0105054936.jpeg "Mit dem leise arbeitenden Raumluftfilter Silentcare von der Filtration Group Industrial aus Deutschland werden etwa aerosoltragende Feinstpartikel zu 99,995 Prozent mit einem sogenannten HEPA-Filter aus der Umgebungsluft entfernt. (Bild: Filtration Group Industrial)")
:quality(80)/p7i.vogel.de/wcms/76/ae/76aedd320fb6fc6b8e944ff148cdb455/0130412089v1.jpeg "Eine neue Entscheidung der EU-Kommission wird auch die Soldaten in der Ukraine freuen. Denn eine große Summe wird nun dafür bereitgestellt, die Ukraine mit Rüstungsgütern weiter zu untersützen, aber auch die EU selbst verteidigungstechnisch auf Vordermann zu bringen ... (Bild: D. Boschkowitsch)")
:quality(80)/p7i.vogel.de/wcms/cc/0b/cc0bbcb973719954c5272ec4d6fa0ce4/0127386265v1.jpeg "Taiwan war mit seinen über 120 Ausstellern auf der EMO Hannover 2025 eins der am meisten vertretenen Ausstellerländer. Wie die gemeinnützige Organisation Taitra resümiert, hinterließ das Land bei den Besuchern einen bleibenden Eindruck, wenn es um zukunftssichernde Technik geht. (Bild: Taitra)")
:quality(80)/p7i.vogel.de/wcms/c4/74/c4741bb9b5a99f4172594e5891972055/0127325727v1.jpeg "Die EMO 2025 war auch der Schauplatz des EMO China Day. Unter anderem diskutierten chinesische Unternehmer dabei mit Benedikt Hofmann (rechts), dem Chefredakteur vom MM Maschinenmarkt, über neue Wege, die der chinesische Maschinenbau derzeit gehen will ... (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/0d/93/0d9352da2f882b748309aab18f143489/0127031928v1.jpeg "Das Metallbearbeitungs-Event des Jahres – die 50. EMO – hat in Hannover die Tore geschlossen, um dann im Jahre 2029 nach Deutschland zurückzukommen. Denn 2027 steigt sie zunächst wieder in Mailand. Erfahren Sie hier, wie sich die Jubiläumsausgabe der Messe entwickelt hat ... (Bild: VDW)")
:quality(80)/p7i.vogel.de/wcms/c7/49/c74972b76ee47950731b3832c7e78458/0130390501v2.jpeg "Skoda verlässt den chinesischen Markt. (Bild: Skoda)")
:quality(80)/p7i.vogel.de/wcms/9d/c6/9dc65fd44e7e479e370409a026ff8aa4/reinraum-fuer-pharma-und-medizintechnik-anforderungen-erfuellen-800x450v1.jpeg "Reinräume in der Pharma- und Medizintechnik sind unverzichtbar. Modulare Betriebsmittel von item für die Reine Produktion und andere Bereiche lassen sich flexibel anpassen. So erfüllen Sie zu jeder Zeit alle relevanten Anforderungen der Branche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/fb/69/fb690a68ac9e813f7d1300075a75007e/high-tech-produkte-fertigen-modulare-betriebsmittel-als-vorteil-800x450v1.jpeg "Flexibel anpassbare Betriebsmittel ermöglichen Unternehmen in der High-Tech-Fertigung einen entscheidenden Wettbewerbsvorteil. Das modulare Baukastenprinzip von item Industrietechnik erleichtert die Umsetzung von Lösungen wie Treppen und Podesten (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/2e/c2/2ec20521d62b2ad02724fedce6fef527/aluprofil-konstruktion-software-fuer-maximale-zeitersparnis-800x450v1.jpeg "So einfach kann die Konstruktion mit Aluprofilen sein: Durch das item Engineeringtool und seine intelligenten Funktionen sparen Sie wertvolle Zeit (Bild: item)")
Energieeffizienz Frequenzumrichter senken Leistungsaufnahme im Teillastbetrieb von Asynchronmotoren um bis zu 30%
Frequenzumrichter können dazu beitragen, die Verluste von Asynchronmotoren, die im Teillastbereich arbeiten, zu reduzieren. Die Untersuchung des Modells einer Asynchronmaschine zeigt, dass sich die Statorspannung als Funktion des Magnetisierungsstromes darstellen lässt. Als Ergebnis zeigt sich, dass sich in Abhängigkeit von der Belastung bei bestimmten Anwendungen die aufgenommene Leistung um bis zu 30% reduziert.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/98600/98681/65.jpg "logo.png ()")
Bei der Ansteuerung einer Asynchronmaschine (ASM) durch den Frequenzumrichter (FU) mit einem konstanten Verhältnis zwischen Frequenz und Spannung kann die ASM von der Drehzahl 0 bis zu ihrem Nennpunkt mit konstantem Moment betrieben werden. Bild 1 zeigt dazu eine typische Steuerkennlinie.
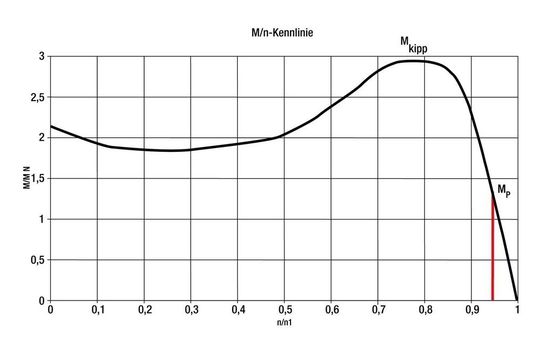
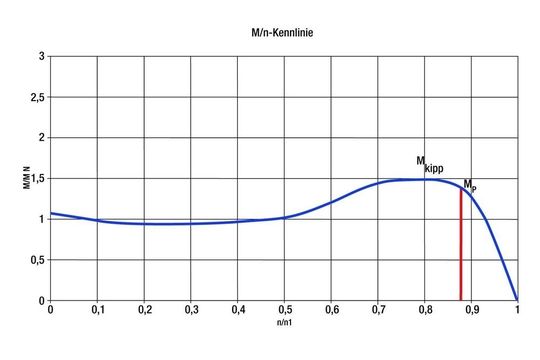
Wird die ASM in der Untermagnetisierung betrieben, das heißt, der magnetische Fluss in der Maschine ist geringer als ihr Nennfluss, so wird die gezeigte Steuerkennlinie verlassen und die Drehzahl-Drehmoment-Kennlinie gestaucht. Im Falle der Untermagnetisierung wird nicht wie üblich beim FU-Betrieb ein konstantes Verhältnis von Spannung zu Frequenz vom FU ausgegeben, sondern die Spannung wird stärker abgesenkt als durch das U/f-Verhältnis vorgegeben.
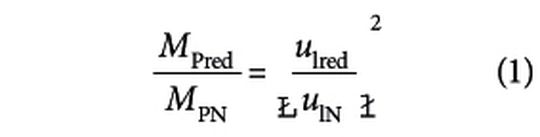
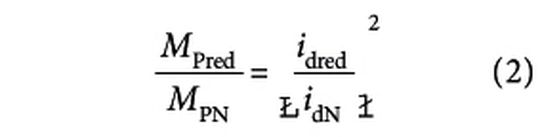
Der Antrieb wird durch das Verfahren „weicher“, weil der Motor eine Untermagnetisierung erfährt. Das bedeutet, dass der Drehzahlabfall des Motors bei Untermagnetisierung größer ist als der Drehzahlabfall bei Nennmagnetisierung, wenn dasselbe Arbeitsmoment (MP) an der Welle abverlangt wird. Eine Erhöhung des Drehzahlabfalls bedeutet gleichzeitig eine Erhöhung des Schlupfes. Untersucht man das Verhalten der ASM bei Untermagnetisierung, stellt man fest, dass die Kippdrehzahl bei Untermagnetisierung gleich der Kippdrehzahl bei Nennmagnetisierung ist. Somit lassen sich Magnetisierungsstrom beziehungsweise -spannung und gefordertes Applikationsmoment unter Kenntnis der M/n-Kennlinie bei Nennmagnetisierung mit den Gleichungen berechnen:
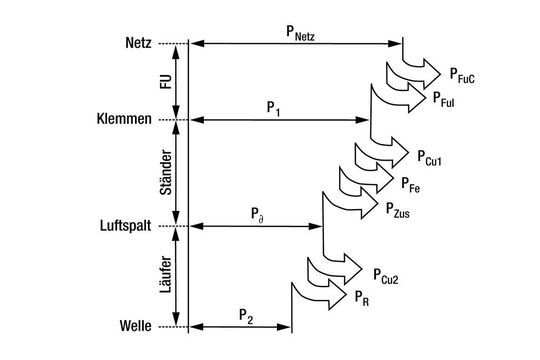
Die Verluste der ASM lasssen sichgrundsätzlich in Ständer- und Läuferverluste unterteilen (Bild 2). Weil die Verluste von Ständer und Läufer abhängig von Strom und Spannung sind, lassen sie sich durch geeignete Ansteuerung der ASM für den jeweiligen Belastungspunkt minimieren und wie folgt zusammenfassen:

Weil durch das Absenken des Magnetisierungsstroms ein Kippen der ASM nicht mehr verhindert werden kann, bedarf es einer Regelung, um diesen Effekt zu vermeiden. Deshalb muss ein Grenzmoment (MP) definiert werden, das unterhalb des Kippmomentes (MKipp) liegt und das beim Senken des Magnetisierungsstromes nicht unterschritten wird. Diese Momentengrenze wird von der Regelung dynamisch an die Anforderungen der Applikation angepasst, sodass der Antrieb nicht kippen kann, aber dennoch immer mit dem geringstmöglichen Magnetisierungsstrom betrieben wird.
Antrieb kann trotz minimalem Magnetisierungsstrom nicht kippen
Der ansteigende Schlupf wird durch die Schlupfkompensation ausgeregelt. Somit wird der Drehzahlabfall, der durch die Untermagnetisierung hervorgerufen wird, wieder kompensiert und die Drehzahl wird auch bei verringerter Magnetisierung nachgeregelt.
Durch die Überlagerung des Drehzahlreglers mit der Energiesparfunktion (ESF) wird die Dynamik des Antriebs verringert, das heißt, er benötigt mehr Zeit, um Lastsprünge auszuregeln. Im Gegensatz zu anderen Lösungen liegt ein großer Vorteil dieser Funktion darin, dass sie für alle Anwendungen eingesetzt werden kann, wo die Dynamik des Antriebs nicht an erster Stelle steht. Es wird immer der aus Energiegesichtspunkten ideale Arbeitspunkt eingestellt.
Verluste von Asynchronmotor und Frequenzumrichter reduzieren
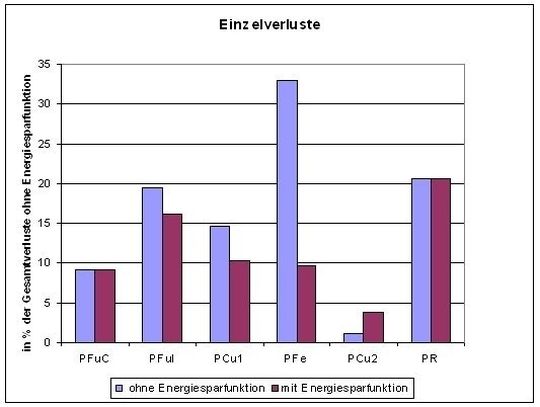
Durch die Energiesparfunktion lassen sich sowohl die Verluste des Umrichters als auch die der ASM minimieren. Dadurch wird auch die insgesamt aufgenommene Leistung reduziert. Die Darstellung in Bild 3 gibt einen Überblick über die Reduktion der Verluste im Frequenzumrichter und der ASM. Bei diesem Beispiel legen wir eine Belastung von 15% der Nennbelastung und Nenndrehzahl zugrunde.
Bild 3 zeigt deutlich, dass sich die Gesamtverluste reduzieren. Die konstanten Umrichterverluste sowie die Reibungsverluste bleiben durch die Absenkung der Magnetisierung unverändert. Die stromabhängigen Verluste und allen voran die Eisenverluste werden jedoch minimiert. Einzig die Verluste in der Kupferwicklung des Läufers steigen an. Die Ursache dafür ist der ansteigende Schlupf, der einen größeren Läuferstrom und somit auch größere Läuferverluste zur Folge hat.
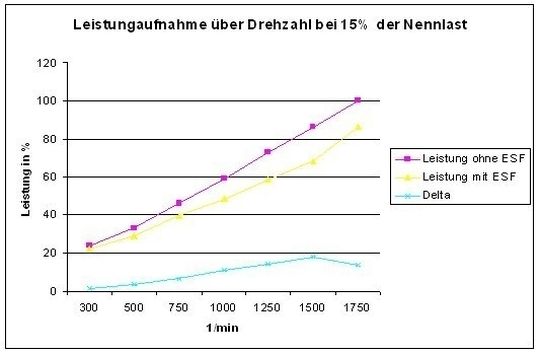
Über den Drehzahlbereich bis zur Nenndrehzahl ergibt sich wie in Bild 4 ersichtlich der Verlauf für die aufgenommene Leistung bei einer Belastung von 15% der Nennlast. Die bei 1750 min–1 aufgenommene Leistung ohne Energiesparfunktion stellt den Bezugswert dar.
Energieeffizienz wird bei elektrischen Antrieben immer wichtiger
Getrieben durch steigende Energiekosten und politischen Druck rückt die Thematik der Energieeffizienz von elektrischen Antrieben immer mehr in den Fokus der industriellen Anwender. Die Hersteller reagieren darauf mit Bestrebungen, die Energieeffizienz der Gesamtkonzepte ihrer Antriebstechnik zu steigern.
Einen wichtigen Beitrag können hier die Frequenzumrichter leisten, der Energiesparansatz kann dabei vielfältig sein. Der Anwender wird häufig mit speziellen Applikationsgeräten oder speziellen Pumpen- und Lüfterfunktionen konfrontiert, bei denen für den Anwendungsfall die geeignete Lastkennlinie zu wählen ist.
Bei passender Lastkennlinie können so auch eine gute Energieeffizienz und gute Antriebseigenschaften erzielt werden. In der Praxis muss man jedoch oft erkennen, dass die Funktion nicht optimal zur Anwendung passt, somit leiden die Energieeffizienz und die Antriebseigenschaften.
Ein Frequenzumrichter für alle Anwendungen
SEW-Eurodrive setzt deshalb beim Thema Energiesparen nicht auf einen speziellen Bereich von Applikationen, sondern optimiert den Einsatz eines Frequenzumrichters für alle Anwendungen, die nicht ein Höchstmaß an Dynamik verlangen. Das Verfahren basiert auf der Anpassung des magnetischen Flusses und des Drehmoments an die Anforderungen der Anwendung.
Der Einsatz der Energiesparfunktion ist ebenso für fördertechnische Anwendungen wie Transportbänder für Stück- und Schüttgut, Rolltreppen wie auch für Pumpen und Lüfter prädestiniert. In Abhängigkeit von der Belastung lässt sich die aufgenommene Leistung somit um bis zu 30% reduzieren. Die Funktion ist über einen Parameter zuschaltbar.
Matthias Ams ist Product Manager im Bereich Geared Motors and AC Drives bei der SEW-Eurodrive GmbH & Co. KG in 76642 Bruchsal.
Artikelfiles und Artikellinks
(ID:228143)
:quality(80)/p7i.vogel.de/wcms/94/19/941922d6fd5f9e18d23603434b1425a8/0127310246v2.jpeg "Gehäuselose Servomotoren lassen sich in beengten Platzverhältnissen sehr effizient einsetzen. (Bild: TQ-Group)")
:quality(80)/p7i.vogel.de/wcms/e5/08/e508f6f5913ffd1232da7865ff592e2a/0125822584v2.jpeg "Das stromlinienförmige Design des LV Titanium, bei dem der Axialantrieb am Ende des Motors montiert ist, spart Platz. (Bild: ABB)")