
:quality(80)/p7i.vogel.de/wcms/dc/f8/dcf855c07b0fdd1117eba0192b11a69c/0130163394v2.jpeg "Am 11. Juni 2026 findet in der Karlsruher Forschungsfabrik der AI Integrated Production Summit statt. (Bild: MM Maschinenmarkt)")
:quality(80)/p7i.vogel.de/wcms/78/76/7876bfdb44623f549a6d03b084576adb/0130015902v2.jpeg "KI gewinnt 2026 in der Fertigung an Bedeutung. (Bild: © miss irine - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ae/42/ae42d571030951d07d6123ff2f60d20b/0130022507v2.jpeg "Daten entstehen überall, sind meist jedoch unstrukturiert verfügbar. KI-Agenten können auf sie zugreifen und sie in einen Kontext stellen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/fe/01/fe0191223d6cfe28be5b3b3c85277db5/0129579847v4.jpeg "Führen Maschinen irgendwann Menschen? (Bild: ChatGPT)")
:quality(80)/p7i.vogel.de/wcms/dd/f0/ddf0641fb1b061a3dd7a8106622b83fc/0132629285v2.jpeg "Die KMF Kemptener Maschinenfabrik GmbH ist seit 1. August Teil der Montanhydraulik GmbH. (Bild: Montanhydraulik)")
:quality(80)/p7i.vogel.de/wcms/f0/6b/f06bb09ad461d492d6c8bbaafd04f245/0132629183v1.jpeg "Eine PFAS-freie DLC-Schicht per Laser! So könnte eine Zukunft ohne die fast unsubstituierbaren PFAS aussehen. Denn Forscher am ILT in Aachen konnten anhand von vier Projekten schon zeigen, wie man zum Beispiel den Kunststoff PEEK dafür nutzen kann. Hier viel mehr dazu ... (Bild: Fraunhofer ILT)")
:quality(80)/p7i.vogel.de/wcms/9d/5d/9d5dc27a098ceb21d263461995921337/0132618753v2.jpeg "Produktion von Zylindern in großen Dimensionen bei Weber-Hydraulik. (Bild: Weber-Hydraulik / Werbeagentur Marks)")
:quality(80)/p7i.vogel.de/wcms/b8/2c/b82c7d8ad5da10d190ae96b05b91f85d/0132538728v1.jpeg "Bauteil aus Titan, das am Austrian Institute of Technology (AIT) in Ranshofen mit einer ganz Neuen Art der Umformung hergestellt wurde. Lesen Sie hier, welche wirtschaftlichen und technischen Vorteile für Titanbauteile sich so für die Zukunft ergeben können ... (Bild: AIT / Joh. Zinner)")
:quality(80)/p7i.vogel.de/wcms/d0/ab/d0ab4930bbaae068650d97f33bdce51c/0132633259v1.jpeg "Nun ist er da! Der zweite Schock, den Chinas Wirtschaft den Europäern beschert. Der BDI spricht von einer wahren Breitseite, die auch die deutschen Unternehmen treffen wird ... (Bild: KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/21/a9/21a9e31b051db6e1445ba1d137b30ee4/0132632379v1.jpeg "So schaut die Batteriefertigung bei Webasto im Werk Schierling aus. Das dortige Know-how hat nun dazu geführt, dass elektrische Hochleistung von dort das neue Coupé des Mercedes-AMG-GT flitzen lässt. Hinzu kommt eine ausgeklügelte Direktkühlung. (Bild: Webasto)")
:quality(80)/p7i.vogel.de/wcms/5d/02/5d02416b986fa33f72614cba801d022e/0132631344v1.jpeg "Grapitelekroden für Batterien bestehen aus natürlichem und synthetischem Graphit. Beide Materialien werden in Zukunft immer stärker gefragt sein. Deshalb stehen schon Projekte, wie etwa von International Graphite und Westwater in den Startlöchern, um nichts zu verpassen ... (Bild: International Graphite)")
:quality(80)/p7i.vogel.de/wcms/f0/79/f0798899f3c69007c8ae4e6d1c88ab81/0132605413v2.jpeg "Treffen sommerliche Hitzeperioden auf Windarmut, steigen die Strompreise am Abend rasant an. Gerade Industriebetriebe mit Schichtbetrieb brauchen dann eine Lösung. (Bild: frei lizenziert / Albrecht Fietz)")
:quality(80)/p7i.vogel.de/wcms/a9/53/a9538a692ce5386a4f3c519f9ad4bd4e/0132597902v1.jpeg "Seit gut einer Woche ist der Batteriehersteller Varta insolvent. Eine gute Nachricht kann aber schon verkündet werden: Es gibt wohl reges Interesse von Investoren! Allerdings bleiben auch einige Fragen in puncto Zukunft von Varta ungeklärt ... (Bild: Varta)")
:quality(80)/p7i.vogel.de/wcms/a4/29/a42928c67871a61d007a834e68457892/0132564098v2.jpeg "Humanoide als Gefahr für die nationale Sicherheit? Sieht Trump so und verbietet ausländische Roboter. (Bild: Gemini / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/bd/8f/bd8f674efba4a45db7b11c139d4c2298/0132544478v1.jpeg "Dass wir möglicherweise nicht mehr so weit davon entfernt sind, dass sich KI-Systeme selber weiterentwickeln und sich dabei unserer Kontrolle entziehen, ist laut Experten nicht zu leugnen. Deshalb fordert man firmenübergreifend ein zurückhaltenderes Vorgehen bei der KI-Entwicklung ... (Bild: © sdecoret - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/c8/e6/c8e6516c3740de9177ecb322fb80813d/0132543541v1.jpeg "Stabilus lässt wissen, dass man nun mit Synapticon zusammenarbeitet, um die Großserienproduktion von humanoiden Robotern in die Wege zu leiten. Integrierte Aktuatoren für die Gelenke von Humanoiden spielen dabei eine Hauptrolle ... (Bild: Stabilus)")
:quality(80)/p7i.vogel.de/wcms/c1/bf/c1bf904a8efe757739db49efe0ece963/0132537193v2.jpeg "Beckhoff hat die Anforderungen an die Steuerungsarchitektur für die Weiterentwicklung der Multigrind Radical erfüllt. Dieter Völkle (Beckhoff Niederlassung Balingen) sowie Gerhard Schnee und Martin Trittler (beide Adelbert Haas) vor der Multigrind Radical (v.l.). (Bild: Beckhoff Automation)")
:quality(80)/p7i.vogel.de/wcms/0d/2e/0d2e080c8f4d732bdc3ddf612251da61/0132599857v1.jpeg "Was man hier erblickt, ist das innovative WAAM-System namens Arctitan von Gefertec. Mit ihr kann man endlich hochwertige Titanbauteile mit konstanten Prozessbedingungen additiv fertigen, wie der Hersteller verspricht. (Bild: Gefertec)")
:quality(80)/p7i.vogel.de/wcms/4e/13/4e13b33da079d7f454b9f195b29ff600/0132589080v2.jpeg "Michael Müller, Head of Digital Engineering & Climate Tech bei Capgemini Engineering. (Bild: Capgemini)")
:quality(80)/p7i.vogel.de/wcms/b6/cf/b6cf5e8066901d5a9c903824ec98e457/0132612565v1.jpeg "Westliche Länder, darunter auch Deutschland, warnen vor den Zugriffen nordkoreanischer Hacker. Sie sollen sich illegaler Methoden bedienen, um an Geld für fragwürdige Programme in ihrem Land zu kommen ... (Bild: Gemeinfrei / Pixabay)")
:quality(80)/p7i.vogel.de/wcms/c4/25/c425ad5226d8486213da33edec2b03f4/0132477485v2.jpeg "GenAI hilft Ingenieuren, unstrukturierte Daten aus Geräteprotokollen und Serviceaufzeichnungen zu verarbeiten sowie Predictive‑Maintenance‑Workflows zu verbessern. (Bild: Mathworks)")
:quality(80)/p7i.vogel.de/wcms/74/7c/747c68140f3cb6586b848b474153c270/0132595388v1.jpeg "Sozusagen den Startknopf für eine KI-Großinitiative hat gestern die EU-Kommission gedrückt. Es geht um das jetzt eröffnete Bietverfahren, durch das soviel Geld zusammenkommen soll, dass Europa bei der künstlichen Intelligenz durch mehrere neue KI-Gigafactories besser vorankommt ... (Bild: J. Stone)")
:quality(80)/p7i.vogel.de/wcms/3a/01/3a01d1e7069219d69e01d5ae6e831bab/0132594808v1.jpeg "Im monetären Sinn Schub verleihen Rolls-Royce derzeit die eigenen Jet-Triebwerke. Aber auch die Systeme der Briten für Rechenzentren sind wegen des KI-Booms sehr gefragt ... (Bild: Rolls-Royce)")
:quality(80)/p7i.vogel.de/wcms/b9/9b/b99b3d48b2ce8f866ce209e8243dc7ca/0132635253v2.jpeg "Wurde am 1. August zum neuen Executive Vice President Sales & Service beim Hamburger Staplerbauer Still bestellt: Andreas Schneider. (Bild: Still)")
:quality(80)/p7i.vogel.de/wcms/4b/68/4b68cedead06988262dba5af07a024fb/0132612268v1.jpeg "Hinter den Mauern des chinesischen Handelsministeriums in Peking ärgert man sich derzeit über Vorwürfe aus den USA: Zig einheimische Unternehmen sollen von Zwangsarbeit profitieren, weshalb diese nun auch den US-Importbeschränkungen unterliegen. Man will sich aber wehren ... (Bild: Y. Cheng)")
:quality(80)/p7i.vogel.de/wcms/cc/0b/cc0bbcb973719954c5272ec4d6fa0ce4/0127386265v1.jpeg "Taiwan war mit seinen über 120 Ausstellern auf der EMO Hannover 2025 eins der am meisten vertretenen Ausstellerländer. Wie die gemeinnützige Organisation Taitra resümiert, hinterließ das Land bei den Besuchern einen bleibenden Eindruck, wenn es um zukunftssichernde Technik geht. (Bild: Taitra)")
:quality(80)/p7i.vogel.de/wcms/c4/74/c4741bb9b5a99f4172594e5891972055/0127325727v1.jpeg "Die EMO 2025 war auch der Schauplatz des EMO China Day. Unter anderem diskutierten chinesische Unternehmer dabei mit Benedikt Hofmann (rechts), dem Chefredakteur vom MM Maschinenmarkt, über neue Wege, die der chinesische Maschinenbau derzeit gehen will ... (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/0d/93/0d9352da2f882b748309aab18f143489/0127031928v1.jpeg "Das Metallbearbeitungs-Event des Jahres – die 50. EMO – hat in Hannover die Tore geschlossen, um dann im Jahre 2029 nach Deutschland zurückzukommen. Denn 2027 steigt sie zunächst wieder in Mailand. Erfahren Sie hier, wie sich die Jubiläumsausgabe der Messe entwickelt hat ... (Bild: VDW)")
:quality(80)/p7i.vogel.de/wcms/9d/c6/9dc65fd44e7e479e370409a026ff8aa4/reinraum-fuer-pharma-und-medizintechnik-anforderungen-erfuellen-800x450v1.jpeg "Reinräume in der Pharma- und Medizintechnik sind unverzichtbar. Modulare Betriebsmittel von item für die Reine Produktion und andere Bereiche lassen sich flexibel anpassen. So erfüllen Sie zu jeder Zeit alle relevanten Anforderungen der Branche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/fb/69/fb690a68ac9e813f7d1300075a75007e/high-tech-produkte-fertigen-modulare-betriebsmittel-als-vorteil-800x450v1.jpeg "Flexibel anpassbare Betriebsmittel ermöglichen Unternehmen in der High-Tech-Fertigung einen entscheidenden Wettbewerbsvorteil. Das modulare Baukastenprinzip von item Industrietechnik erleichtert die Umsetzung von Lösungen wie Treppen und Podesten (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/2e/c2/2ec20521d62b2ad02724fedce6fef527/aluprofil-konstruktion-software-fuer-maximale-zeitersparnis-800x450v1.jpeg "So einfach kann die Konstruktion mit Aluprofilen sein: Durch das item Engineeringtool und seine intelligenten Funktionen sparen Sie wertvolle Zeit (Bild: item)")
Grundlagen Linearmotoren Linearmotor: Der „abgewickelte“ Rotationsmotor
Wenn hohe Dynamik beim translatorischen Vortrieb gefragt ist, sind Linearmotoren die Antriebe der Wahl. Was Linearmotoren sind und vieles mehr, erfahren Sie hier.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/53100/53175/65.jpg "Föhrenbach.jpg (Föhrenbach GmbH)")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/45600/45637/65.jpg "IEF Logo_grau_rot.jpg ()")
Der Linearmotor leitet sich vom Rotationsmotor ab und wurde bereits Mitte des 19. Jahrhunderts realisiert. In den 1950er- und 60er-Jahren entwickelte der englische Ingenieur Eric Laithwaite den Linearmotor weiter und brachte das Prinzip sogar in Form der Magnetschwebebahn (Maglev – magnetic levitation) in einem Prototypen zur Anwendung.
:quality(80)/images.vogel.de/vogelonline/bdb/1244800/1244819/original.jpg "(Hiwin)")
:quality(80)/images.vogel.de/vogelonline/bdb/1244800/1244821/original.jpg "(Hiwin)")
Wie ist ein Linearmotor aufgebaut?
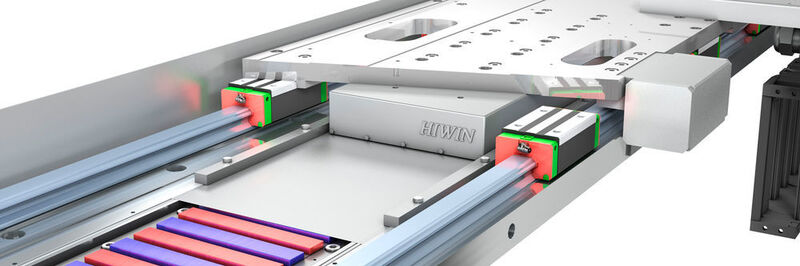
Im Gegensatz zum Rotationsmotor ist der Stator, also die Magnete beziehungsweise Elektromagnete, beim Linearmotor nicht kreisfömig um den Läufer angeordnet, sondern – wie der Name sagt – linear. Somit ist der Linearmotor praktisch ein abgewickelter Rotationsmotor. Dabei kann der Verfahrweg prinzipiell beliebig lang sein und auch kurvenförmig verlaufen. Aus diesem Grund eignet sich der Linearmotor auch zum Antrieb von Zügen.
Wie beim Rotoationsmotor besteht der Linearmotor in den meisten Fällen aus einer Kombination von wechselstrombetriebenen Elektromagneten sowie Permanentmagneten. Dabei lassen sich Beschleunigung und Geschwindigkeit stufenlos über die Frequenz der Wechselspannung regeln. Liegen die Elektromagnete im Stator, spricht man von einem magnetischen Wanderfeld, das den Läufer mit sich führt. Leicht versetzte Spulen ermöglichen es, die Laufrichtung zu wechseln.
Man unterscheidet bei einem Linearmotor zwei Konstruktionssysteme: Entweder mit feststehenden Permanentmagneten und bewegten Spulen (Moving Coil Motor) oder mit feststehenden Elektromagneten, wobei die Komponente mit den Permanentmagneten bewegt wird (Moving Magnet Motor). Bei letzterem vereinfacht sich die Wartung dadurch, dass keine Stromzuführung mit dem beweglichen Teil mitgeführt werden muss. Dies kann auch die Lebensdauer verlängern. Jedoch lassen sich mit dem Moving-Coil-System längere Verfahrwege realisieren.
Allen Bauarten von Linearmotoren ist gemeinsam, dass sie neben dem eigentlichen Antrieb eine Führung für den Läufer sowie ein Messsystem zur Positionsbestimmung benötigen.
Eigenschaften der Linearmotoren
Im Vergleich zu anderen Arten von Linearantrieben haben Linearmotoren einige herausragende Eigenschaften. So kommen Linearmotoren ohne eine Umwandlung von der Dreh- zur Linearbewegung aus. Daher spricht man bei Linearmotoren vom Direktantrieb. Dadurch kommt es zu geringeren mechanischen Verlusten einerseits, andererseits erlaubt der Linearmotor auch kurvenförmige Bewegungen. Dies lässt sich beispielsweise mit Zahnriemenantrieben oder Kugelgewindetrieben nicht realisieren. Bei den indirekten Antrieben ist letztlich auch der Verfahrweg begrenzt. Zwar erreichen Zahnriemenantriebe ähnliche Geschwindigkeiten wie Direktantriebe, jedoch haben sie bei der Beschleunigung und insbesondere der Präzision deutlich das Nachsehen.
Für Anwendungen, in denen gerade Vorschübe bei mittleren Verfahrwegen und mittlerer Präzision gefordert sind, haben Zahnriemenantriebe jedoch einen entscheidenden Vorteil gegenüber Linearmotoren: Sie sind deutlich kostengünstiger. Insbesondere, wenn eine sehr hohe Präzision bei der Positionierung gefragt ist, kommt beim Linearmotor zum Tragen, dass günstige Magnetsysteme zur Positionsbestimmung durch optische Systeme ersetzt werden müssen – was die Kosten erhöht. Zudem steigt der Preis für die Magnetsysteme mit zunehmendem Verfahrweg.
Auftretende Materialerwärmung bei der Konstruktion von Linearmotoren berücksichtigen
Da sich Linearmotoren bei Spitzenlasten stark erwärmen können, muss die dabei auftretende Materialerwärmung berücksichtigt werden, denn sie führt einerseits zu Ungenauigkeiten in der Positionierung, wobei den Positionssensoren wiederum eine große Bedeutung zukommt. Andererseits führt die Erwärmung zu Spannungen im Material oder auf der Plattform, auf der der Motor sitzt.
Linearmotoren erlauben neben ihrer hohen Positioniergenauigkeit im Bereich von 1 µm Verfahrgeschwindigkeiten von mehr als 10 m/s und Beschleunigungen bis zu 250 m/s². Dies stellt auch entsprechende Anforderungen an die Tragestruktur, als an die jeweilige Maschine. Insbesondere wenn größere Massen bewegt werden, treten sehr hohe Beschleunigungskräfte auf, welche die Struktur sicher abfangen muss.
Hohe Ansprüche stellen Linearmotoren je nach Ausführung auch an die Lagerung und Führung des Läufers. Neben Gleitschienen kommen Wälzlagerungen oder Räder auf der mechanischen Seite infrage. Um den Abstand zur Magnetschiene zu halten, finden auch Luftkissen Anwendung. Beim Transrapid beispielsweise wird der Zug, welcher den Läufer des Linearmotorsystems darstellt, nahezu reibungsfrei alleine durch Magnete in der Führung gehalten.
Typen von Linearmotoren
Je nach Anwendung und Anforderung kommen unterschiedliche Bauformen von Linearmotoren zum Einsatz. Beispielsweise lässt sich in einem Umfeld mit sensibler Elektronik ein starkes durch den Motor verursachtes äußeres Magnetfeld vermeiden, indem der Stator aus einer zylindrischen Magnetwickung besteht, in dem sich ein Permanentmagnet bewegt. Neben dem geringen äußeren Magnetfeld zeichnet sich dieser so genannte Patronenmotor durch eine hohe Leistungsdichte aus.
Eine häufige Bauform ist die des Flachbettmotors. Insbesondere der permanenterregte Flachbett-Linearmotor hat eine hohe Leistungsdichte. Dabei bewegt sich der Läufer mit dem Wanderfeld in einer Schiene, die mit Permanentmagneten ausgestattet ist. Wichtig ist hierbei eine robuste Lagerung des Läufers, die diesen innerhalb der starken Magnetfelder stabil halten muss. Je nach Umgebung müssen diese zudem nach außen hin abgeschirmt werden.
Als weitere Bauform gibt es noch die eisenlosen Linearmotoren: Zwischen zwei Magnetbahnen liegt als bewegliches Element eine Spule ohne Eisenkern. Durch die geringe Masse des Läufers ermöglicht diese Bauform extrem hohe Beschleunigungen. Allerdings stellt hierbei die Wärmeabfuhr ein Problem dar, sodass keine hohen Dauerkräfte möglich sind.
Linearmotoren im Einsatz
Wie erwähnt, finden Linearmotoren häufig dort Verwendung, wo hohe Dynamik oder hohe Präzision gefordert sind. In Handhabungssystemen können Linearmotoren durch die hohen Geschwindigkeiten beispielsweise Taktzeiten verkürzen und dadurch zur Kosteneinsparung beitragen. Hier amortisieren sich die Anschaffungskosten von Linearmotoren oft in kurzer Zeit. Präzise Positionierung ist wiederum in Werkzeugmaschinen gefragt. Aber auch in Festplatten kommt diese Eigenschaft von Linearmotoren zum Verfahren der Schreib-/Leseköpfe zum Tragen. Da Linearmotoren wenige oder gar keine mechanisch reibenden Komponenten enthalten, finden sie häufig in Reinräumen Anwendung – ein Aspekt, der ebenfalls für die Festplatte relevant ist. Die Kombination von Präzision und Geschwindigkeit ist beispielsweise beim Laser-, Wasser- oder Plasmaschneiden relevant, wo Linearmotoren die Positionierung und Führung der Schneideinheit übernehmen.
Literatur:
Berardinelli, Anamaria (2008): Über den Entwurf eines permanentmagneterregten Linearmotors. Shaker Verlag, ISBN 978-3832276461
Schepp, Frank (2002): Linearmotorgetriebene Pressen für die Stanztechnik. Berichte aus Produktion und Umformtechnik. Shaker Verlag, ISBN 978-3826599309
Funktionsprinzip und Anwendungsmöglichkeiten von Linearmotoren
Links zu Herstellern und Anbietern:
Stangengeführte Linearmotoren von Dunkermotoren
Zylindrische Linearmotoren von Anca Motion
* Andreas Mühlbauer ist freier Journalist in Heidelberg.
(ID:44738035)
:quality(80)/p7i.vogel.de/wcms/ab/74/ab74ebfbde3dbac3e281c4b7dd1b4ecd/0128851216v2.jpeg "Mockup des neuen Motors (links: Stator & Rotor des Hauptantriebs, rechts: Rotor des Nebenantriebs). (Bild: Astemo)")
:quality(80)/p7i.vogel.de/wcms/48/86/4886b1ae846692711e2dff2d93038d24/0132349161v2.jpeg "Das ist eine innovative Drehverbindung mit segmentiertem Direktantrieb von Franke aus Aalen. Sie überwindet quasi die Schwerkraft, um Computertomographen langlebiger und präziser zu machen. (Bild: Franke)")