
:quality(80)/p7i.vogel.de/wcms/dc/f8/dcf855c07b0fdd1117eba0192b11a69c/0130163394v2.jpeg "Am 11. Juni 2026 findet in der Karlsruher Forschungsfabrik der AI Integrated Production Summit statt. (Bild: MM Maschinenmarkt)")
:quality(80)/p7i.vogel.de/wcms/78/76/7876bfdb44623f549a6d03b084576adb/0130015902v2.jpeg "KI gewinnt 2026 in der Fertigung an Bedeutung. (Bild: © miss irine - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ae/42/ae42d571030951d07d6123ff2f60d20b/0130022507v2.jpeg "Daten entstehen überall, sind meist jedoch unstrukturiert verfügbar. KI-Agenten können auf sie zugreifen und sie in einen Kontext stellen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/fe/01/fe0191223d6cfe28be5b3b3c85277db5/0129579847v4.jpeg "Führen Maschinen irgendwann Menschen? (Bild: ChatGPT)")
:quality(80)/p7i.vogel.de/wcms/fa/8e/fa8e2631478312ec9d5b260e947547dc/0131731546v1.jpeg "Das ist ein Hinweis von Wings for Living, dass in die Jahre gekommene Rotorblätter von Windkraftanlagen nicht unbedingt auf der Halde oder im Ofen landen müssen. (Bild: Wings for Living)")
:quality(80)/p7i.vogel.de/wcms/23/b2/23b2f1c5719be48682290c834a248d2c/0131704313v1.jpeg "Das Statistische Bundesamt bescheinigt Deutschland im Rückblick auf die ersten Monate des zweite Quartals 2026 einen leichten Zuwachs in Sachen Produktion und Export. Der Iran-Krieg bleibt ein Bremsfaktor. Und auch China hat die Ausfuhren deutlich gesteigert ... (Bild: © Yellow Boat - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/15/47/1547f77911430ba102eac50bf4177d7b/0131699044v1.jpeg "Am Fraunhofer ILT in Aachen widmet man sich unter anderem der Reparatur von Druckguss- und Umformwerkzeugen (im Bild). Das Besondere ist, dass man dazu laserbasierte Verfahren nutzt, die wesentliche Vorteile im Vergleich zu üblichen Methoden ins Feld führen ... (Bild: Fraunhofer ILT)")
:quality(80)/p7i.vogel.de/wcms/a8/ea/a8ea32d74d2f3a71b570d3b0f8b8c1d1/0131697322v1.jpeg "Der deutsch-französische Kampfjet bleibt wohl für immer nur ein Gedanke. Denn Bundeskanzler Friedrich Merz und der französische Kollege Emmanuel Macron haben entschieden, dass das mit Airbus und Dassault einfach nichts wird ... (Bild: Karambasamba)")
:quality(80)/p7i.vogel.de/wcms/36/37/363783d3ed4d8ae81eefc0a0255bcadb/0131740259v1.jpeg "So sieht die Spectrum-Rakete von Isar Aerospace aus München aus. Sie ist zwar erst in der Testphase, soll aber Spacex beim Transport von Satelliten einmal ablösen. Grund zum Jubeln gibt es auch, denn es sind neue Investoren-Millionen unterwegs ... (Bild: Isar Aerospace)")
:quality(80)/p7i.vogel.de/wcms/b9/c5/b9c5bb475dbc9d96cf9166faa2a3a8c4/0131738943v1.jpeg "Weltraumtechnik steht wohl hoch im Kurs, wie die Messe ILA in Berlin beweist (Symbolbild). Das Bundesland Sachsen strebt in dieser Hinsicht übrigens jetzt eine Hauptrolle an. Die Voraussetzungen dafür seien ideal ... (Bild: Nasa)")
:quality(80)/p7i.vogel.de/wcms/25/1b/251ba2af0a73d1f42208cdfe92370b2d/0131738381v1.jpeg "Es dämmert Entlastung am Horizont auf, wenn es um die horrenden Strompreise in Deutschland geht. Denn Katherina Reiche verkündet, dass alles sogar besser wird als zunächst angedacht ... (Bild: Stromimi)")
:quality(80)/p7i.vogel.de/wcms/2c/2a/2c2a37f8d3ce265602971cb696a05066/0131738366v1.jpeg "ERC System ist ein Start-up, das sich auch der Drohnenentwicklung widmet. Was man hier sieht, ist eine Schwerlastdrohne, die 250 Kilogramm wuppen kann. Vor allem das Militär interessiere sich für das unbemannte Flugsystem, das nun schneller kommt, als zunächst geplant ... (Bild: ERC System)")
:quality(80)/p7i.vogel.de/wcms/ca/2b/ca2b6ef2b8102b72f46fa12900908074/0131717514v1.jpeg "Wasserstoff ist die Alternative zu Koks, um die Stahlerzeugung klimafreundlicher zu machen. Am besten nimmt man grünen Wasserstoff, der mithilfe des Stroms von Windkraftanlagen und Solarfeldern aus Wasser erzeugt wurde. Salzgitter hat sich diesen Wasserstoff nun mittelfristig gesichert ... (Bild: © Alexander Limbach - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/a8/56/a856cd08697317915387cff3ae5f0bb9/0131689370v1.jpeg "Wacker zeigt auf der Battery Show in Stuttgart vom 9. bis 11. Juni, was man mit Silicon in der Elektromobilität alles erreichen kann. Dazu gehört etwa das Elastomer Elastosil CM RT, das sich bei einwirkender Hitze in Keramik verwandelt und Strahlung abschirmt. Aber das ist noch nicht alles ... (Bild: A. Zeller / Wacker)")
:quality(80)/p7i.vogel.de/wcms/35/96/359665ee61f8ad3c45a2125309efa639/0131643886v1.jpeg "Man kann nicht so arg viel erkennen, aber das ist laut FH Aachen der Blick auf eine ganz neue Art der Carbonfaserherstellung. Denn an der Hochschule setzt man dazu auf eine neuartige Plasmatechnik, im im Beitrag erklärt wird ... (Bild: FH Aachen / Chr. Schopp)")
:quality(80)/p7i.vogel.de/wcms/bc/e2/bce2c65f8f2317e41a3cae0892bbd15a/0131692056v1.jpeg "Speziell für den Einsatz im Servicebereich hat Igus mit dem Iggy Rob Home einen neuen kostengünstigen und CE-konformen humanoiden Roboter entwickelt. (Bild: Igus)")
:quality(80)/p7i.vogel.de/wcms/66/70/6670ac1701a41bc95a2abd9c04123e1a/0131680763v1.jpeg "Das telemetrische Messsystem (TMS) von Kistler arbeitet mit dem mobilen Ladungsverstärkermodul 5190A. Es kann direkt auf dem Sensor auf der sich bewegenden Maschinenkomponente montiert werden. Auch das stationäre Basismodul 5290A gehört dazu. Es wird allerdings am Maschinenrahmen angebracht. (Bild: Kistler)")
:quality(80)/p7i.vogel.de/wcms/cc/cc/cccc931bc2bc9d86cfc7833ba18334a2/0130502320v1.jpeg "In der Schaltschrankmontage werden die einzelnen Komponenten sorgfältig und präzise verdrahtet. (Bild: Lapp)")
:quality(80)/p7i.vogel.de/wcms/15/21/15215c2fd9f0de65f357a6d551f2bd47/0131643181v2.jpeg "Eine durchgängige Sicht auf eine Funktion als Ganzes muss Informationen aus Software, Sensorik, Hardware, Sicherheit und Zulassungen in einem System vereinen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/b5/7c/b57c17feb18fd09b3fffb6a4a6fa5eaf/0131692255v4.jpeg "Ein Bediener bei der Werkzeugvermessung mit STP Futura CNC: Effizienter durch die Integration in die Werkzeugmanagementsoftware Tooldirector VM von Coscom. (Bild: Coscom)")
:quality(80)/p7i.vogel.de/wcms/27/5b/275b60584deff4a02587c9dc4061657b/0131676599v2.jpeg "Der Antriebstechnik-Hersteller Flender wechselt erneut den Besitzer. (Bild: Flender)")
:quality(80)/p7i.vogel.de/wcms/a9/bc/a9bc6496fbb30a561cd946a3f01bf5ae/0131675964v1.jpeg "Künstliche Intelligenz zu nutzen, ist für viele Unternehmen immer attraktiver, wie das Ifo-Institut herausgefunden hat. Die Zahl der User nimmt jedenfalls kontinuierlich zu. Doch wie der ZEW ermittelt hat, gibt es auch Unternehmen, die KI strikt verbieten ... (Bild: © fotomek - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/0d/61/0d616c1fe7e49b0884a3b51e9a34c6dc/0131675932v1.jpeg "Das Weltraumunternehmen Spacex von Elon Musk kann sich über einen zweiten Mietvertrag in Sachen Rechenleistung für KI-Anwendungen freuen. Der neueste Deal läuft ab Ende des Jahres mit keinem Geringeren als Google ... (Bild: Spacex)")
:quality(80)/p7i.vogel.de/wcms/50/fe/50fe99710b674d6746dc42b55f8b03b4/0131603430v1.jpeg "Die neue 3D-Messmaschine „MiSTAR 555“ von Mitutoyo ist bei Méca-Précis in einer robotergesteuerten Messzelle installiert. Ihre Genauigkeit sei über einen weiten Temperaturbereich gewährleistet, was an ihrem effizient arbeitenden Absolut-Encoder liege. (Bild: Mitutoyo)")
:quality(80)/p7i.vogel.de/wcms/2e/83/2e83fac0f4ba9486943748e9923ab055/0131725354v1.jpeg "Vor allem kleine und mittelständige Unternehmen tun sich bei Fördergeldanträgen nicht leicht, weiß die Hentschel Fördermittelberatung. Sie unterschätzten auch die Modalitäten, die beachtet werden müssten, um eine Genehmigung zu erhalten. Doch hier erfahren Sie, wie das geht ... (Bild: Stempelbude)")
:quality(80)/p7i.vogel.de/wcms/54/11/541125b2d206c7532437b6bf0a98b6de/0101144676v2.jpeg "Welche Messen finden 2025 statt? Wir geben Ihnen einen Überblick. (Bild: © Robert Kneschke - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/48/5c/485cf545f728e4b0164b832dae7f63ec/0109052935.jpeg "Beachtet man ein paar einfache Regeln, tritt man in Videokonferenzen noch professioneller auf. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/96/9e/969e5b78fe8a0ba6088913a107471566/0109295155.jpeg "So entwickelte sich das Innovationsgeschehen bei dem deutschen KMU im Verlauf der Coronakrise. (Bild: IFM)")
:quality(80)/p7i.vogel.de/wcms/ca/20/ca20f03bcb7e0b46d69495ad92782048/0105054936.jpeg "Mit dem leise arbeitenden Raumluftfilter Silentcare von der Filtration Group Industrial aus Deutschland werden etwa aerosoltragende Feinstpartikel zu 99,995 Prozent mit einem sogenannten HEPA-Filter aus der Umgebungsluft entfernt. (Bild: Filtration Group Industrial)")
:quality(80)/p7i.vogel.de/wcms/26/78/2678c8f52b6e3cfaff393d961186a703/0131717654v2.jpeg "Der autonome mobile Roboter „GESSbot“ von Gessmann mit einem BS21-Flachriemenband von Schnaithmann transportiert Werkstückträger, KLT oder komplette Baugruppen zwischen definierten Übergabepunkten einer Transfer- oder Montagelinie. (Bild: Schnaithmann)")
:quality(80)/p7i.vogel.de/wcms/cc/0b/cc0bbcb973719954c5272ec4d6fa0ce4/0127386265v1.jpeg "Taiwan war mit seinen über 120 Ausstellern auf der EMO Hannover 2025 eins der am meisten vertretenen Ausstellerländer. Wie die gemeinnützige Organisation Taitra resümiert, hinterließ das Land bei den Besuchern einen bleibenden Eindruck, wenn es um zukunftssichernde Technik geht. (Bild: Taitra)")
:quality(80)/p7i.vogel.de/wcms/c4/74/c4741bb9b5a99f4172594e5891972055/0127325727v1.jpeg "Die EMO 2025 war auch der Schauplatz des EMO China Day. Unter anderem diskutierten chinesische Unternehmer dabei mit Benedikt Hofmann (rechts), dem Chefredakteur vom MM Maschinenmarkt, über neue Wege, die der chinesische Maschinenbau derzeit gehen will ... (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/0d/93/0d9352da2f882b748309aab18f143489/0127031928v1.jpeg "Das Metallbearbeitungs-Event des Jahres – die 50. EMO – hat in Hannover die Tore geschlossen, um dann im Jahre 2029 nach Deutschland zurückzukommen. Denn 2027 steigt sie zunächst wieder in Mailand. Erfahren Sie hier, wie sich die Jubiläumsausgabe der Messe entwickelt hat ... (Bild: VDW)")
:quality(80)/p7i.vogel.de/wcms/9d/c6/9dc65fd44e7e479e370409a026ff8aa4/reinraum-fuer-pharma-und-medizintechnik-anforderungen-erfuellen-800x450v1.jpeg "Reinräume in der Pharma- und Medizintechnik sind unverzichtbar. Modulare Betriebsmittel von item für die Reine Produktion und andere Bereiche lassen sich flexibel anpassen. So erfüllen Sie zu jeder Zeit alle relevanten Anforderungen der Branche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/fb/69/fb690a68ac9e813f7d1300075a75007e/high-tech-produkte-fertigen-modulare-betriebsmittel-als-vorteil-800x450v1.jpeg "Flexibel anpassbare Betriebsmittel ermöglichen Unternehmen in der High-Tech-Fertigung einen entscheidenden Wettbewerbsvorteil. Das modulare Baukastenprinzip von item Industrietechnik erleichtert die Umsetzung von Lösungen wie Treppen und Podesten (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/2e/c2/2ec20521d62b2ad02724fedce6fef527/aluprofil-konstruktion-software-fuer-maximale-zeitersparnis-800x450v1.jpeg "So einfach kann die Konstruktion mit Aluprofilen sein: Durch das item Engineeringtool und seine intelligenten Funktionen sparen Sie wertvolle Zeit (Bild: item)")
Humanoide Roboter Humanoide Roboter dringen überaus gelenkig in die Welt des Menschen ein
Zunehmend agieren menschenähnliche Roboter in Umgebungen, die bisher nur für den Menschen geschaffen waren. Mit den vielfältigen Einsatzmöglichkeiten wird sich die VDI-Zukunftskonferenz „Humanoide Roboter 2016“ beschäftigen, die am 13. und 14. Dezember in Aschheim bei München stattfindet.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/65200/65264/65.jpg "Logo.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130700/130777/65.jpg "Neues Logo_550 pxl_maxon_logo_standard_rgb_50mm.jpg ()")
„Humanoide Roboter bieten das bei weitem größte Spektrum an Möglichkeiten für einen Einsatz im Team mit dem Menschen. Sie können aufgrund ihrer Morphologie und kinematischen Struktur nahezu jede für den Menschen gemachte Umgebung beherrschen und stellen bei Beachtung einiger Randbedingungen auch psychologisch die geringste Barriere für eine Mensch-Roboter-Kooperation dar“, beschreibt Prof. Dr. Frank Kirchner, Standortleiter des Deutschen Forschungszentrums für Künstliche Intelligenz GmbH (DFKI) Bremen und Leiter der Arbeitsgruppe Robotik an der Universität Bremen, die Relevanz der Thematik.
Im industriellen Umfeld seien mit Blick auf einen Einsatz der humanoiden Roboter einerseits spezielle Umgebungen relevant, in denen der Mensch akut oder latent gefährdet ist. „Zum anderen sind es alle Bereiche, bei denen durch körperliche Zwangshaltung mittel- und langfristige Schädigungen oder Beeinträchtigungen zu erwarten sind. Und ein anderes Feld werden Assistenten sein, die es dem Menschen erlauben, sich auf kognitiv anspruchsvolle Aufgaben zu konzentrieren“, so Kirchner, der als Konferenzleiter durch die Veranstaltung führen wird, zum Anwendungsspektrum.
Gestaltung und Design humanoider Roboter
Aufgrund der immer komplexeren Morphologien von Robotern sind ganzheitliche Ansätze wie die Ganzkörperregelung (Whole Body Control) notwendig, um die große Anzahl von Gelenken zu steuern und mehrere Aufgaben parallel ausführen zu können. Das betrifft nicht nur humanoide Roboter, sondern auch mobile Manipulatoren mit einem oder mehreren Armen. Lösungsansätze dazu wird Dr.-Ing. José de Gea Fernández, Teamleiter Roboterregelung am DFKI Robotics Innovation Center in Bremen darstellen. Außerdem wird er über die Entwicklung von modularer und übertragbarer generischer Software für Robotersysteme unterschiedlicher Morphologie sprechen. „Diese ist von großer Bedeutung, um die Programmierung von Robotern zu vereinfachen – auch mit Blick auf Industrie 4.0. Roboter müssen flexibel und schnell anpassbar an kleine Losgrößen sein“, sagt de Gea Fernández. Fachkräfte könnten einfacherweise den Roboter selbst programmieren. Zudem könne eine generische Software für Roboter verschiedener Hersteller genutzt werden.
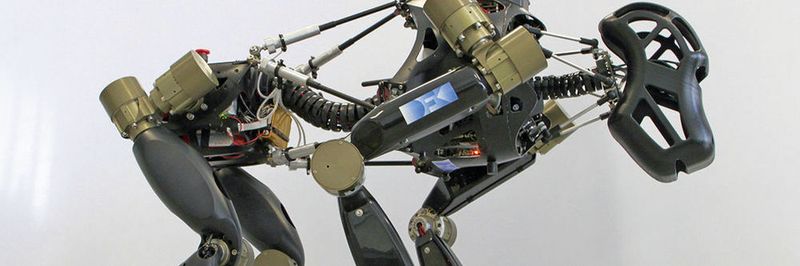
:quality(80)/images.vogel.de/vogelonline/bdb/1089300/1089328/original.jpg "Der hominide Roboter Charlie besitzt die Fähigkeit, seine Haltung an die jeweilige Gegebenheit anzupassen. (DFKI GmbH, Daniel Kühn)")
Humanoide Roboter
Humanoide Roboter dringen überaus gelenkig in die Welt des Menschen ein
Im industriellen Umfeld ist Relevanz für die Ansteuerung von mobilen Manipulatoren, welche komplexe und eventuell parallele Interaktionsaufgaben mit der Umgebung durchführen, groß. De Gea Fernández nennt Beispiele: „Ein Arm hält ein Objekt, währenddessen ein zweiter Arm am Objekt operiert. Oder ein humanoider Roboter bohrt, auf einer Leiter stehend, ein Loch in die Wand. Über seine eigentliche Aufgabe hinaus muss er dann seine Körperhaltung bewahren und das Gleichgewicht halten können.“
(ID:44326478)
:quality(80)/p7i.vogel.de/wcms/09/89/0989451f109b0c4622a75dc50b3c3270/0125646902v1.jpeg "Am MIRMI der TU München will man eine Art Gütesiegel schaffen, durch das Robotersysteme in Zukunft in sensible und weniger sensible Typen eingeteilt werden können. Das soll unter anderem dabei helfen, das Einsatzgebiet eines Robotersystems zielgerichteter auszuwählen ... (Bild: A. Heddergott / TUM)")
:quality(80)/p7i.vogel.de/wcms/7c/8f/7c8f49828ee44a029fb4abd3e810ed99/0127828764v2.jpeg "Humanoide Roboter erfordern besondere Sicherheitsvorkehrungen, weil sie direkt mit Menschen interagieren. (Bild: Synapticon)")