
:quality(80)/p7i.vogel.de/wcms/dc/f8/dcf855c07b0fdd1117eba0192b11a69c/0130163394v2.jpeg "Am 11. Juni 2026 findet in der Karlsruher Forschungsfabrik der AI Integrated Production Summit statt. (Bild: MM Maschinenmarkt)")
:quality(80)/p7i.vogel.de/wcms/78/76/7876bfdb44623f549a6d03b084576adb/0130015902v2.jpeg "KI gewinnt 2026 in der Fertigung an Bedeutung. (Bild: © miss irine - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ae/42/ae42d571030951d07d6123ff2f60d20b/0130022507v2.jpeg "Daten entstehen überall, sind meist jedoch unstrukturiert verfügbar. KI-Agenten können auf sie zugreifen und sie in einen Kontext stellen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/fe/01/fe0191223d6cfe28be5b3b3c85277db5/0129579847v4.jpeg "Führen Maschinen irgendwann Menschen? (Bild: ChatGPT)")
:quality(80)/p7i.vogel.de/wcms/21/a7/21a7953c941707df0daa7530ef229eb6/0131992076v1.jpeg "Das Quartett der weltweit größten Zerspanungsmaschinen macht die Fahrständerfräsmaschine DMF 600/11 von DMG Mori vollständig. Rund 6.000 Millimeter misst etwa ihr Verfahrweg in X-Richtung. (Bild: DMG Mori)")
:quality(80)/p7i.vogel.de/wcms/31/29/312990343e71c961e0ebb083380c32a5/0131976801v1.jpeg "Winkewinke: Drei, die von Beginn an dabei waren, verabschieden sich aus Deutschland. Denn was bereits Anfang des Jahres verkündet wurde, schreitet nun in Richtung Vollzug – die Schließung des Playmobil-Werkes in Dietenhofen. (Bild: Playmobil)")
:quality(80)/p7i.vogel.de/wcms/38/70/3870579fb5e9725f3de1669cd033154e/0131975753v1.jpeg "Grün ist die Hoffnung! Bekanntlich soll auch die deutsche Stahlindustrie klimaneutral werden. Das geht mit Wasserstoff statt Koks. Doch viele befürchten, dass man dann die Konkurrenzfähigkeit verlieren könnte. Eine aktuelle Studie verneint das, wenn die Politik die richtigen Knöpfe drückt ... (Bild: Stahlmassivo)")
:quality(80)/p7i.vogel.de/wcms/4f/59/4f59a8f64e0aedf4208ce7b72422b984/0131953065v1.jpeg "Mit dem Kantenfräser Trutool TKA 700 von Trumpf lassen sich im Handumdrehen solch saubere Verrundungen erreichen. Für die rund 500 Meter Kantenlänge an den 83 Alublechen für das Scheibenpferd hat Kollinger nur einen Nachmittag gebraucht – inklusive Ein- und Ausspannen. (Bild: Trumpf)")
:quality(80)/p7i.vogel.de/wcms/2f/2b/2f2baea295530b0dd43b3ea563408103/0131997518v2.jpeg "Nach dem Rückzug aus der industrieller Antriebstechnik, den Haushaltgeräten und der Automobiltechnik ist EBM-Papst wieder auf Wachstumskurs. (Bild: christof-wolf.com)")
:quality(80)/p7i.vogel.de/wcms/9b/67/9b67030d6d8a48551ff85691491175ea/0131993966v1.jpeg "Der Mann geht, die Frau kommt! Bettina Steingruber wirkt ab 1. Juli 2026 als neue Geschäftsführerin bei Trumpf Maschinen Austria ... (Bild: Trumpf)")
:quality(80)/p7i.vogel.de/wcms/5d/dc/5ddcc4ea86fd70be99593f2a3aa8bd72/fu-c3-9fball-wm-2026-ki-1364x768v1.jpeg "Die Fußball-Weltmeisterschaft 2026 läuft noch bis zum 19. Juni. (Bild: KI-generiert / Gemini)")
:quality(80)/p7i.vogel.de/wcms/c6/d8/c6d8219228a3256353c9cb86927fbc65/0131980094v1.jpeg "Cariad entwickelt Software für die Marken Volkswagen, Audi und Porsche. Vor einiger Zeit hat man die vor allem in Berlin verstreuten Standorte in Bahnhofsnähe gebündelt, um etwa effizienter arbeiten zu können, denn es gibt auch Probleme ... (Bild: Cariad)")
:quality(80)/p7i.vogel.de/wcms/eb/d0/ebd0a1d73320d6b88557efe73c9c441e/0131955410v1.jpeg "Das großflächige, sogenannte bifaziale 546-Watt-Perowskit-Silizium-Modul bei der Fertigung im Module-TEC des Fraunhofer ISE. Was diese Solarzellen für positive Auswirkungen haben, erfahren Sie im nebenstehenden Beitrag ... (Bild: Fraunhofer ISE)")
:quality(80)/p7i.vogel.de/wcms/90/67/906752f53a4e1bb288f495167ce6b318/0131954184v1.jpeg "Bei Innovent Technologieentwicklung in Jena hat man bewiesen, dass man mit Atmopshärendruckplasma Kupfer- (wie hier) und Silberoberflächen von Oxiden respektive von Sulfiden reinigen kann – ohne garstige Chemikalien und ohne viel Energieaufwand ... (Bild: Innovent)")
:quality(80)/p7i.vogel.de/wcms/11/62/1162845d36a08b9a9a6145cc2b017fa8/0131936980v2.jpeg "Der Hufschmied-Firmensitz in Bobingen erzeugt jetzt Solarstrom für den Eigenbedarf. (Bild: Hufschmied Zerspanungssysteme)")
:quality(80)/p7i.vogel.de/wcms/9b/64/9b6457a6964c42ee08b875a81231caa5/0131807833v2.jpeg "UCS-Gehäuse mit Kühlkörper und Wärmespreizer. (Bild: Phoenix Contact)")
:quality(80)/p7i.vogel.de/wcms/68/58/6858ebcb209f3ee60d48182f412ab927/0131971282v4.jpeg "Mit dem EasyGrinder festigt Minerd & Sons seine Position als technologischer Vorreiter. (Bild: Teqram)")
:quality(80)/p7i.vogel.de/wcms/3e/f9/3ef961e39ef636a98acda4551b797754/0131997869v2.jpeg "Der 3D Model Inspector prüft automatisiert Bauteile, Baugruppen und Zeichnungen anhand von Konstruktionsstandards. (Bild: Contelos)")
:quality(80)/p7i.vogel.de/wcms/93/1a/931a35db6d90693283049b840dcacd2b/st-hannover-149-6048x3400v1.jpeg "Der fachliche Austausch zwischen Besucher und Aussteller ist das, was die Schraubtec ausmacht. (Bild: PHOTOVISION-DH GmbH)")
:quality(80)/p7i.vogel.de/wcms/dc/dd/dcddbfca2e08c691093ac87e4fc1b755/0131909549v1.jpeg "Diesen Anblick will das EU-Parlament in Zukunft nur noch als Zwischenphase und nicht mehr als Dauerzustand. Denn eine neue Verordnung sieht vor, dass Autos bald so konstruiert sein müssen, dass ihre Einzelteile möglichst leicht ausgebaut und wiederverwendet werden können ... (Bild: Schrottking)")
:quality(80)/p7i.vogel.de/wcms/5f/21/5f211f0f65dc165eff24c7976c56fc88/0131850167v4.jpeg "Um die Fertigung schneller, robuster und flexibler zu machen, muss die Produktion IT-orientierter gestaltet werden. Dafür braucht es auch virtuelle Steuerungen. (Bild: Audi AG)")
:quality(80)/p7i.vogel.de/wcms/a5/1d/a51d05ac000450efe478398cda824315/download-pressefoto-reiche-2350x1321v1.jpeg "Bundeswirtschaftsministerin Katharina Reiche fordert die Industrie dazu auf, Künstliche Intelligenz stärker zu nutzen. (Bild: Presse- und Informationsamt der Bundesregierung)")
:quality(80)/p7i.vogel.de/wcms/4c/49/4c49296aa2aa358328c9e7a55f53e28d/0131950116v1.jpeg "Dieser Mitarbeiter einer Firma gehört zur Spezies der Alleinarbeiter. Manchmal kann es entspannend sein, quasi sein eigener Herr zu sein, doch was ist, wenn ein Notfall vorliegt. Dann retten etwa Totmannschalter von Almas Industries (hier am Gürtel befestigt) Leben ... (Bild: Almas Industries)")
:quality(80)/p7i.vogel.de/wcms/a3/cc/a3ccb3c7406c495d1f7606c0c99191a2/0131938886v1.jpeg "Hier wächst die Zukunft in Pforzheim bei Witzenmann, woher heute gemeldet wird, dass betriebsbedingte Kündigungen ausgeschlossen sind. Mit den Investitionen in den Standort schaffe man derzeit die Grundlage für weiteres Wachstum ... (Bild: Witzenmann)")
:quality(80)/p7i.vogel.de/wcms/6c/a6/6ca68f5d7e803d8b9cda8c5c3ee7f8dc/0131975563v1.jpeg "Nach neun Jahren hat es China mal wieder geschafft, den US-amerikanischen Spitzenreiter in Sachen Supercomputer vom Platz zu verweisen. Denn der Lineshine-Rechner war bei einem einheitlichen Test der schnellste von allen ... (Bild: Shuangong)")
:quality(80)/p7i.vogel.de/wcms/54/11/541125b2d206c7532437b6bf0a98b6de/0101144676v2.jpeg "Welche Messen finden 2025 statt? Wir geben Ihnen einen Überblick. (Bild: © Robert Kneschke - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/48/5c/485cf545f728e4b0164b832dae7f63ec/0109052935.jpeg "Beachtet man ein paar einfache Regeln, tritt man in Videokonferenzen noch professioneller auf. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/96/9e/969e5b78fe8a0ba6088913a107471566/0109295155.jpeg "So entwickelte sich das Innovationsgeschehen bei dem deutschen KMU im Verlauf der Coronakrise. (Bild: IFM)")
:quality(80)/p7i.vogel.de/wcms/ca/20/ca20f03bcb7e0b46d69495ad92782048/0105054936.jpeg "Mit dem leise arbeitenden Raumluftfilter Silentcare von der Filtration Group Industrial aus Deutschland werden etwa aerosoltragende Feinstpartikel zu 99,995 Prozent mit einem sogenannten HEPA-Filter aus der Umgebungsluft entfernt. (Bild: Filtration Group Industrial)")
:quality(80)/p7i.vogel.de/wcms/a5/ee/a5eea83fa41a1dde4146351a6260b80d/0131978363v1.jpeg "Der richtige Zeitpunkt! Für Melanie Kreis, die noch amtierende Finanzchefin der Deutschen Post, enden die Aufgaben mit Auslaufen des aktuellen Vertrages Mitte nächsten Jahres, auf eigenen Wunsch. Hier mehr dazu ... (Bild: Deutsche Post)")
:quality(80)/p7i.vogel.de/wcms/6d/6d/6d6d877408198ca73d12ad0a9653a438/0131950133v1.jpeg "Der BDI muss seine Meinung zum Wirtschaftswachstum revidieren. Es wird demnach deutlich schlechter, als erwartet. Der BDI-Präsident Peter Leibinger außerdem mit Blick auf China: „Führt die EU allgemeine Schutzzölle ein, wäre das unser Tod!“ ... (Bild: BDI)")
:quality(80)/p7i.vogel.de/wcms/cc/0b/cc0bbcb973719954c5272ec4d6fa0ce4/0127386265v1.jpeg "Taiwan war mit seinen über 120 Ausstellern auf der EMO Hannover 2025 eins der am meisten vertretenen Ausstellerländer. Wie die gemeinnützige Organisation Taitra resümiert, hinterließ das Land bei den Besuchern einen bleibenden Eindruck, wenn es um zukunftssichernde Technik geht. (Bild: Taitra)")
:quality(80)/p7i.vogel.de/wcms/c4/74/c4741bb9b5a99f4172594e5891972055/0127325727v1.jpeg "Die EMO 2025 war auch der Schauplatz des EMO China Day. Unter anderem diskutierten chinesische Unternehmer dabei mit Benedikt Hofmann (rechts), dem Chefredakteur vom MM Maschinenmarkt, über neue Wege, die der chinesische Maschinenbau derzeit gehen will ... (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/0d/93/0d9352da2f882b748309aab18f143489/0127031928v1.jpeg "Das Metallbearbeitungs-Event des Jahres – die 50. EMO – hat in Hannover die Tore geschlossen, um dann im Jahre 2029 nach Deutschland zurückzukommen. Denn 2027 steigt sie zunächst wieder in Mailand. Erfahren Sie hier, wie sich die Jubiläumsausgabe der Messe entwickelt hat ... (Bild: VDW)")
:quality(80)/p7i.vogel.de/wcms/9d/c6/9dc65fd44e7e479e370409a026ff8aa4/reinraum-fuer-pharma-und-medizintechnik-anforderungen-erfuellen-800x450v1.jpeg "Reinräume in der Pharma- und Medizintechnik sind unverzichtbar. Modulare Betriebsmittel von item für die Reine Produktion und andere Bereiche lassen sich flexibel anpassen. So erfüllen Sie zu jeder Zeit alle relevanten Anforderungen der Branche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/fb/69/fb690a68ac9e813f7d1300075a75007e/high-tech-produkte-fertigen-modulare-betriebsmittel-als-vorteil-800x450v1.jpeg "Flexibel anpassbare Betriebsmittel ermöglichen Unternehmen in der High-Tech-Fertigung einen entscheidenden Wettbewerbsvorteil. Das modulare Baukastenprinzip von item Industrietechnik erleichtert die Umsetzung von Lösungen wie Treppen und Podesten (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/2e/c2/2ec20521d62b2ad02724fedce6fef527/aluprofil-konstruktion-software-fuer-maximale-zeitersparnis-800x450v1.jpeg "So einfach kann die Konstruktion mit Aluprofilen sein: Durch das item Engineeringtool und seine intelligenten Funktionen sparen Sie wertvolle Zeit (Bild: item)")
Mensch-Roboter-Kollaboration Forscher entwickeln Roboter-Tentakel aus künstlichen Muskeln
Forscher haben aus einem flexiblen Elastomer künstliche Muskeln hergestellt, die elektrisch stimuliert werden. Daraus lassen sich flexible Roboterarme konstruieren, die ohne weitere Antriebe oder Sensorik auskommen.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/93200/93203/65.jpg "LOGO2.jpg ()")
Aus einem Verbundwerkstoff schaffen Forscher der Universität des Saarlandes neue Roboter, die wendig, leicht und flexibel sind und die Zusammenarbeit mit Menschen voranbringen sollen.
Zwar arbeiten Menschen bereits mit sogenannten Cobots Seite an Seite, kollaborativen Robotern, die keinen Schutzzaun mehr benötigen. Doch das Problem bei der Mensch-Maschine-Interaktion ist der Mensch selbst, der keinem festen Programm, sondern plötzlicher, mitunter unlogischer Eingebung folgt oder schlicht abgelenkt ist. Cobots sind deshalb mit Sensoren ausgestattet, um rechtzeitig zu stoppen - oder sind gepolstert und bewegen sich langsam, um einen Zusammenstoß ohne Verletzungen zu garantieren.
Dieelektrisches Elastomer als flexibles Material
An einer neuen, smarten Art von Roboterarmen arbeitet das Team um Professor Stefan Seelecke und Juniorprofessor Gianluca Rizzello an der Universität des Saarlandes und am Saarbrücker Zentrum für Mechatronik und Automatisierungstechnik (Zema). Die neue Technologie soll weiche Roboterwerkzeuge ermöglichen, die leichter, wendiger und flexibler sind als die heutigen starren technischen Bauteile.
Der Stoff aus dem diese neuen, weichen Roboterarme gebaut sind, heißt „dielektrisches Elastomer“, eine Unterart der Polymere. Aus diesem Verbundwerkstoff erschaffen die Saarbrücker Forscher künstliche Muskeln und Nerven. Die besonderen Eigenschaften des Werkstoffs machen es möglich, nach dem Vorbild der Natur zu arbeiten: Elastomere lassen sich stauchen und nehmen ihre ursprüngliche Form wieder ein, strecken sich also wieder.
Roboterarm aus künstlichen Muskeln
Die Forscher bedrucken das Elastomer beidseitig mit Elektroden. Bei elektrischer Spannung, ziehen sich die Elektroden an und stauchen das Elastomer, das dabei gleichzeitig seine Fläche ausdehnt. Das Elastomer kann sich also zusammenziehen und strecken wie ein Muskel. Diese Eigenschaften nutzen die Wissenschaftler als Aktor. Indem sie das elektrische Feld ändern, lassen die Ingenieure das Elastomer hochfrequent vibrieren, stufenlos kraftvolle Hub-Bewegungen vollführen oder auch in jeder gewünschten Stellung verharren.
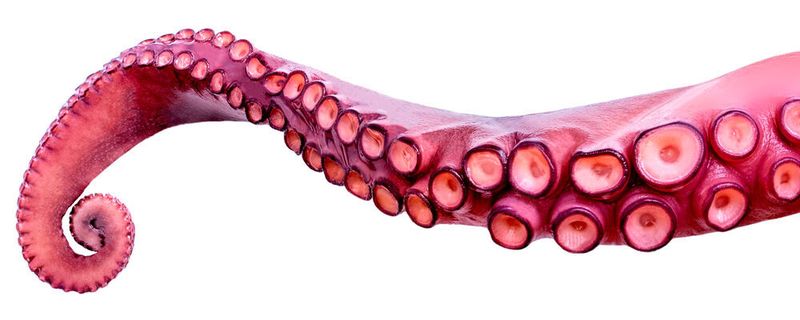
Aus vielen dieser kleinen Muskeln setzen die Forscher nun flexible Roboterarme zusammen. In einem Roboter-Tentakel aneinandergereiht, bewirkt ihr Zusammenspiel, dass dieser sich wie der Fangarm eines Kraken in alle Richtungen biegen und schlängeln kann: Anders als bei den schweren und starren Robotergelenken heute üblicher Roboter, sind der Freiheit dieses Tentakels keine Grenzen gesetzt. Ein Tentakel-Prototyp soll in etwa einem Jahr vorliegen.

Der Roboter-Tentakel wird intelligent
Gianluca Rizzello ist Spezialist, wenn es darum geht, dem Kunststoff Intelligenz einzuhauchen. Er gibt dem Roboter-Gehirn, also der Steuerungseinheit, den nötigen Input, damit sie den Arm intelligent bewegen kann. „Diese Systeme sind komplexer als die heutiger Roboterarme. Polymerbasierte Komponenten mit künstlicher Intelligenz zu steuern, ist weit schwieriger als bei herkömmlichen mechatronischen Systemen“, erklärt Rizzello.
Die Elastomer-Muskeln fungieren dabei zugleich als Nerven des Systems: Sie haben selbst Sensor-Eigenschaften. Daher kommt dieser Roboterarm ohne weitere Sensorik aus. „Jede Verformung des Elastomers, jede Änderung seiner Geometrie, bewirkt eine Änderung der elektrischen Kapazität und lässt sich präzisen Messwerten zuordnen. Messen wir die elektrische Kapazität, wissen wir, wie das Elastomer gerade verformt ist und können hieraus sensorische Daten ablesen“, erläutert der Ingenieur.
Mit diesen Werten lassen sich die Bewegungsabläufe präzise modellieren und programmieren: Hierfür intelligente Algorithmen zu entwickeln, um den neuartigen Roboter-Tentakeln ihr gewünschtes Verhalten anzutrainieren, steht im Mittelpunkt von Rizzellos Forschung. „Wir arbeiten daran zu verstehen, welche physikalischen Eigenschaften dem Verhalten der Polymere zugrunde liegen. Je mehr wir darüber wissen, umso passgenauere Algorithmen können wir zu ihrer Steuerung entwerfen“, sagt der Juniorprofessor.
Roboterarme ohne Motor, Hydraulik oder Druckluft
Die Technologie soll skalierbar sein: Sie kann in feinen Tentakeln etwa für medizinische Instrumente zum Einsatz kommen, aber auch bei großen Industrierobotern. Anders als die heutigen Roboterarme, die schon mit ihrem beachtlichen Gewicht gegen die Schwerkraft ankämpfen müssen, werden diese Roboterarme leicht sein.
„Sie kommen ohne Motoren, Hydraulik oder Druckluft aus und funktionieren nur mit elektrischem Strom. Die Bauform der Elastomer-Muskeln kann dem jeweiligen Bedarf angepasst werden. Auch brauchen sie nur wenig Energie. Je nach Kapazität sind dies nur Ströme im Mikroampere-Bereich. Das macht diese Robotertechnologie, für die wir derzeit die Grundlagen erforschen, energieeffizient und kostengünstig“, erklärt Stefan Seelecke.
(ID:47481813)
:quality(80)/p7i.vogel.de/wcms/24/61/24611cd95d30438204e5ee6947817142/0129979594v2.jpeg "Professor Ralf Busch (links) und sein Team mit Doktorand Amirhossein Ghavimi (rechts) wollen Elektromotoren durch metallisches Glas energieeffizienter machen. (Bild: Universitaet des Saarlandes)")
:quality(80)/p7i.vogel.de/wcms/56/d9/56d9fbbd2760ddab44000958538732ee/0130477464v2.jpeg "Um die Temperaturverteilung im Elektromotor in Echtzeit mit KI-Methoden schätzen zu können, sammelte Doktorand Saeed Farzami an einem Teststand Massen von Daten. Hierzu stattete er einen Elektromotor an allen kritischen Stellen mit Sensoren aus: an verschiedenen Orten in den Wicklungen, im Rotor und auch am Gehäuse. (Bild: Oliver Dietze)")