
:quality(80)/p7i.vogel.de/wcms/dc/f8/dcf855c07b0fdd1117eba0192b11a69c/0130163394v2.jpeg "Am 11. Juni 2026 findet in der Karlsruher Forschungsfabrik der AI Integrated Production Summit statt. (Bild: MM Maschinenmarkt)")
:quality(80)/p7i.vogel.de/wcms/78/76/7876bfdb44623f549a6d03b084576adb/0130015902v2.jpeg "KI gewinnt 2026 in der Fertigung an Bedeutung. (Bild: © miss irine - stock.adobe.com / KI-generiert)")
:quality(80)/p7i.vogel.de/wcms/ae/42/ae42d571030951d07d6123ff2f60d20b/0130022507v2.jpeg "Daten entstehen überall, sind meist jedoch unstrukturiert verfügbar. KI-Agenten können auf sie zugreifen und sie in einen Kontext stellen. (Bild: PTC)")
:quality(80)/p7i.vogel.de/wcms/fe/01/fe0191223d6cfe28be5b3b3c85277db5/0129579847v4.jpeg "Führen Maschinen irgendwann Menschen? (Bild: ChatGPT)")
:quality(80)/p7i.vogel.de/wcms/49/6b/496b684e7247b9dd983260cabaefbf74/0132348702v1.jpeg "Mit seinen Anlagenlösungen für die Serienproduktion von Drohnenkomponenten und elektrischen Antriebssystemen unterstützt Grob Hersteller auf dem Weg von der Prototypenfertigung zur industriellen Serienproduktion. (Bild: Grob-Werke)")
:quality(80)/p7i.vogel.de/wcms/2b/57/2b57d885bba90d524deab9bbe02b51fd/0132339409v1.jpeg "So sieht das CMT-Schweißen mit der WAAM-Roboteranlage von Alotec aus der Entfernung aus. Weil gleich zwei Schweißsysteme genutzt werden können, klappt die additive Fertigung von Metallteilen besonders wirtschaftlich. (Bild: Alotec Dresden)")
:quality(80)/p7i.vogel.de/wcms/f6/79/f679edc19d000ff66600353b8cdf4872/0132335933v1.jpeg "Betram Brossardt, Hauptgeschäftsführer der Verbände Bayme und VBM, hat im Rahmen einer Pressekonferenz in München ein düsteres Bild der Lage in der bayerischen Metall- und Elektrobranche zeichnen müssen ... (Bild: VBW)")
:quality(80)/p7i.vogel.de/wcms/93/20/9320ac913e916ef63aecabd45706ab11/0132332593v1.jpeg "Der Verkauf von Autos liegt schon länger unter dem Niveau der Möglichkeiten. Das gilt weltweit für viele Hersteller, wie eine Analyse des CAM offenbart. Lesen Sie hier, wem es vergleichsweise gutgeht und wem eher nicht ... (Bild: Imaxx)")
:quality(80)/p7i.vogel.de/wcms/7f/8a/7f8af5165c3da6f655d8d551ced82d5a/0132357147v2.jpeg "ABB steht vor der größten Übernahme der Konzerngeschichte. (Bild: ABB)")
:quality(80)/p7i.vogel.de/wcms/68/53/68531423b5f3829c2edfa96c99fcccd6/0132354056v1.jpeg "Am 16. Juli war es soweit! Der neue Hub von Siemens Mobility in Fürstenfeld ist eröffent worden. Dieser ist in Zukuft Unterstützer für das Weltkompetenzzentrum in Graz, wie Siemens sagt. Lesen Sie hier, was nun dort passieren soll ... (Bild: Siemens Mobility)")
:quality(80)/p7i.vogel.de/wcms/5f/c4/5fc4adeecbc45558d72abb48d2797fbb/0132347925v1.jpeg "Der Bundeskanzler Friedrich Merz wurde gefragt, was er von dem Trend hält, dass chinesische Autohersteller Wege suchen, um in Europa respektive Deutschland zu produzieren. Für Merz sei das aber keine Frage, die die Politik zu beantworten habe ... (Bild: CDU)")
:quality(80)/p7i.vogel.de/wcms/85/76/8576887769c021b2cd20dfdc2245e43e/0113143253v7.jpeg "In unserem China Market Insider versorgen wir Sie regelmäßig mit relevanten Informationen direkt aus China. (Bild: © Eisenhans - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/63/20/632025bae58a8323e0ddc1e6d19ebc52/0132354325v1.jpeg "Jetzt gibt es kompostierbare Leiterplatten aus Pilzmyzel, um in Zukunft vielleicht Berge von Elektroschrott zu vermeiden. Hier ist eine solche im Funktionstest. Hat sie ausgedient, kann sie entsorgt werden, wobei die Elektronikkomponenten auf ihr, keinen Schaden nehmen würden ... (Bild: TU Bergakademie Freiberg / A. Hiekel)")
:quality(80)/p7i.vogel.de/wcms/06/ad/06ad98b9ae27ff384b43ccb85eae6094/0132322161v2.jpeg "Daniel Reichert, Leiter der Initiative Lean & Green und Director Team Industrial Excellence der T&O Group. (Bild: T&O Group)")
:quality(80)/p7i.vogel.de/wcms/22/9e/229e5544145e0ba8b4a33e1658c33185/0132311387v1.jpeg "An diesen Masten flatterte bis jetzt die Aufschrift Siemens Energy. Nun kam es zur Umbenennung der Siemens-Tochter in Omterra. Lesen Sie ... (Bild: Omterra)")
:quality(80)/p7i.vogel.de/wcms/03/32/0332310fb7b992211d08f8b303a7a2e8/0132310706v1.jpeg "Das Grundwasser im Bereich der Tesla-Fabrik in Grünheide bei Berlin (Symbolbild) ist nach offiziellen Berichten von den Betriebsabläufen nicht gefährdet ... (Bild: GWAT)")
:quality(80)/p7i.vogel.de/wcms/88/ac/88ac4b709c94dc2ae56e2e8826080ec0/0132352379v2.jpeg "CFO Andreas Schoberleitner und CEO Christoph Knogler (v.l.) blicken auf ein erfolgreiches Geschäftsjahr 2025/26 mit rund 6 Prozent Wachstum zurück. (Bild: GregorHartl.at)")
:quality(80)/p7i.vogel.de/wcms/6a/a3/6aa3ed4bdfe4b9fdb20856f7fec1dcf4/0131802512v2.jpeg "Rosenberger bietet robuste HF-Kabellösungen für die zuverlässige Integration industrieller Kamerasysteme (Bild: Rosenberger)")
:quality(80)/p7i.vogel.de/wcms/3d/eb/3deba5a65181f7e4ccf97a02c596bd75/0132353833v1.jpeg "Der Mikromotor mit Wasserantrieb! Im durchsichtigen, 3D-gedruckten Bauteil, dreht sich der schwebende „Schwimmer“ (rot-blau markiert) an der Wasseroberfläche. Das könnte der Kniff sein, um jetzt auch feinste Faserbündel für Kabel und Medizintechnik herzustellen. Hier mehr dazu ... (Bild: Cheng Zeng / Sinano)")
:quality(80)/p7i.vogel.de/wcms/1a/9a/1a9a8dc89df99da98a87c730ad966a91/0132320959v2.jpeg "Die Schaeffler-Zentrale im fränkischen Herzogenaurach. (Bild: Schaeffler)")
:quality(80)/p7i.vogel.de/wcms/55/55/55555da0cfafdb8a4d7a449f04411577/0132308449v1.jpeg "Mit Solidworks Flow Simulation optimieren Ingenieure die Flugeigenschaften moderner Bälle. (Bild: Dassault Systèmes)")
:quality(80)/p7i.vogel.de/wcms/8f/a0/8fa001f5ec8ab3253bdd6718fc49f0d6/0132296234v1.jpeg "KI für Europa! Trumpf informiert, dass man nun Partner des KI-Netzwerkes IPAI aus Heilbronn ist. Die Ditzinger bringen nicht zuletzt praxisgerechte KI-Erfahrung mit, wie etwa den Sortmaster Vision in Kombination mit dem Sortmaster Station, was hier zu sehen ist. Hier mehr dazu ... (Bild: Trumpf)")
:quality(80)/p7i.vogel.de/wcms/a5/37/a53718d2643452cab437e74bb716954c/0132282863v2.jpeg "Software wird für Werkzeugmaschinenhersteller und Unternehmen aus der Metallbearbeitung immer wichtiger. (Bild: © Lee - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/cc/f5/ccf54924e6bb3d01c34a4d89118daf6a/0132337981v1.jpeg "Das zweite Quartal 2026 war für den Chemiegiganten BASF erfreulicher als erwartet. Nun traut man sich, die Prognosen für das ganze Jahr anzuheben ... (Bild: BASF)")
:quality(80)/p7i.vogel.de/wcms/76/ce/76ce3d692668101dc59a33c323863888/0132355773v1.jpeg "Die Ifoy-Trophäen sind gern gesehene Mitbringsel von einer der jährlichen Preisverleihungen anlässlich des Awards „International Intralogistics and forklift truck of the year\" in mehreren Kategorien. (Bild: Ifoy)")
:quality(80)/p7i.vogel.de/wcms/27/a2/27a29d6612e8aa98722889401d68157c/0132361428v2.jpeg "Mit Mietgeräten aus dem Hause Stabau, rund 1.000 Stück hält man derzeit vor, bleiben die Kunden flexibel. (Bild: Stabau)")
:quality(80)/p7i.vogel.de/wcms/cc/0b/cc0bbcb973719954c5272ec4d6fa0ce4/0127386265v1.jpeg "Taiwan war mit seinen über 120 Ausstellern auf der EMO Hannover 2025 eins der am meisten vertretenen Ausstellerländer. Wie die gemeinnützige Organisation Taitra resümiert, hinterließ das Land bei den Besuchern einen bleibenden Eindruck, wenn es um zukunftssichernde Technik geht. (Bild: Taitra)")
:quality(80)/p7i.vogel.de/wcms/c4/74/c4741bb9b5a99f4172594e5891972055/0127325727v1.jpeg "Die EMO 2025 war auch der Schauplatz des EMO China Day. Unter anderem diskutierten chinesische Unternehmer dabei mit Benedikt Hofmann (rechts), dem Chefredakteur vom MM Maschinenmarkt, über neue Wege, die der chinesische Maschinenbau derzeit gehen will ... (Bild: VCG)")
:quality(80)/p7i.vogel.de/wcms/0d/93/0d9352da2f882b748309aab18f143489/0127031928v1.jpeg "Das Metallbearbeitungs-Event des Jahres – die 50. EMO – hat in Hannover die Tore geschlossen, um dann im Jahre 2029 nach Deutschland zurückzukommen. Denn 2027 steigt sie zunächst wieder in Mailand. Erfahren Sie hier, wie sich die Jubiläumsausgabe der Messe entwickelt hat ... (Bild: VDW)")
:quality(80)/p7i.vogel.de/wcms/55/70/55709612974ffb9d6de4d750bf2b0ab2/0132332572v1.jpeg "Trumpf aus Ditzingen gibt bekannt, dass man den US-amerikanischen Biege- und Stanzwerkzeughersteller Mate Precision Technologies übernommen hat. Lesen Sie hier, wofür dieser Schritt gut sein soll ... (Bild: Trumpf)")
:quality(80)/p7i.vogel.de/wcms/fe/3e/fe3edd05d14a6201d496db31732ff5e3/0132283322v1.jpeg "Bosch hat eine Finanzspritze von der Trump-Regierung erhalten, um eine Chipfabrik in Kalifornien zu pushen. Der deutsche Konzern will aber viele Milliarden in die Hand nehmen, um in den Vereinigten Staaten die Zukunft zu sichern ... (Bild: Bosch)")
:quality(80)/p7i.vogel.de/wcms/9d/c6/9dc65fd44e7e479e370409a026ff8aa4/reinraum-fuer-pharma-und-medizintechnik-anforderungen-erfuellen-800x450v1.jpeg "Reinräume in der Pharma- und Medizintechnik sind unverzichtbar. Modulare Betriebsmittel von item für die Reine Produktion und andere Bereiche lassen sich flexibel anpassen. So erfüllen Sie zu jeder Zeit alle relevanten Anforderungen der Branche. (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/fb/69/fb690a68ac9e813f7d1300075a75007e/high-tech-produkte-fertigen-modulare-betriebsmittel-als-vorteil-800x450v1.jpeg "Flexibel anpassbare Betriebsmittel ermöglichen Unternehmen in der High-Tech-Fertigung einen entscheidenden Wettbewerbsvorteil. Das modulare Baukastenprinzip von item Industrietechnik erleichtert die Umsetzung von Lösungen wie Treppen und Podesten (Bild: item)")
:quality(80)/p7i.vogel.de/wcms/2e/c2/2ec20521d62b2ad02724fedce6fef527/aluprofil-konstruktion-software-fuer-maximale-zeitersparnis-800x450v1.jpeg "So einfach kann die Konstruktion mit Aluprofilen sein: Durch das item Engineeringtool und seine intelligenten Funktionen sparen Sie wertvolle Zeit (Bild: item)")
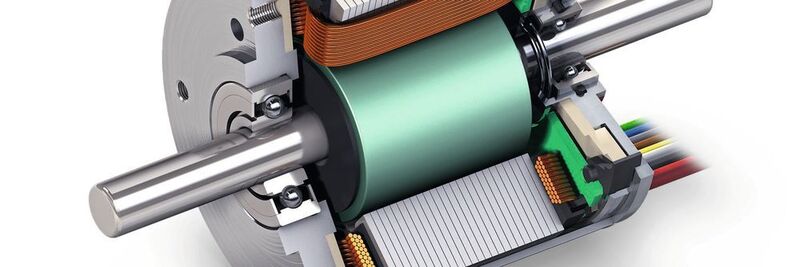
Elektromotoren Hohe Induktivität beeinflusst Drehzahlverhalten bürstenloser Motoren
Motoren mit einer Eisenkernwicklung erzeugen einen höheren Magnetfluss und der Motor wird stärker. Allerdings verlangsamt die damit verbundene hohe Induktivität die Reaktion des Stroms.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/130700/130777/65.jpg "Neues Logo_550 pxl_maxon_logo_standard_rgb_50mm.jpg ()")
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/45900/45920/65.jpg "Logo_Neu.jpg ()")
- Vorsicht bei der Auslegung von Motoren mit genuteten Wicklungen für hohe Drehzahlen! Sie könnten mehr Spannung benötigen als gedacht.
- Bei niedrigen Drehzahlen kann man problemlos die spezifizierten Motordaten verwenden.
- Zusätzlich können Sättigungseffekte das maximal erreichbare Drehmoment einschränken und die resultierende mechanische Zeitkonstante ist länger als die ideale Angabe in der Spezifikation.
Im Gegensatz zu den klassischen, eisenlosen Motoren haben die Flachmotoren von Maxon und die EC-i-Motoren eine Wicklung mit Eisenkern. Dies ergibt einen höheren Magnetfluss der Wicklung und der Motor wird stärker (Bild 1). Allerdings verlangsamt die hohe Induktivität aufgrund des Eisenkerns die Reaktion des Stroms. Bei hohen Drehzahlen können sich Abweichungen vom einfachen linearen Verhalten der Motoren mit eisenloser Wicklung ergeben, zum Beispiel bei DCX- und ECX-Speed-Motoren von Maxon. Ein weiterer Effekt ist die magnetische Sättigung im Eisenkern bei hohen Strömen. Beide Effekte sind im schematischen Diagramm im Bild 2 zusammengefasst, das man auch im Katalog von Maxon findet.
:quality(80)/images.vogel.de/vogelonline/bdb/1601200/1601224/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1601200/1601239/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1597800/1597817/original.jpg "(Maxon)")
:quality(80)/images.vogel.de/vogelonline/bdb/1597800/1597819/original.jpg "(Maxon)")
Die Motorwicklung stellt eine induktive und resistive Last dar, und der Motorstrom wird exponentiell gedämpft anwachsen, wenn eine Spannung angelegt wird. Das exponentielle Verhalten ist durch die elektrische Zeitkonstante, τel, charakterisiert, die sich einfach aus der Anschlussinduktivität Lmot geteilt durch den Anschlusswiderstand Rmot des Motors berechnet, τel = Lmot ⁄ Rmot. Der maximale Strom am Ende ist durch das ohmsche Gesetz gegeben, Iend = Umot ⁄ Rmot (vergleiche Bild 3.
Elektrische Zeitkonstante und Kommutierung
Bürstenlose Motoren werden elektronisch kommutiert, das heißt, der Strom in jeder Phase wird ein- und ausgeschaltet. Bild 4 zeigt den idealen Stromverlauf bei Blockkommutierung in den drei Phasen. Dies dient als Grundlage zur Spezifikation der Motoren von Maxon.
Die Induktivität bewirkt, dass sich der Wicklungsstrom nicht so abrupt ändern kann, wie es Bild 4 andeutet. Doch wie viel Zeit wird in jedem Kommutierungsintervall für den Stromanstieg benötigt?
Berechnen wir die Dauer eines Kommutierungsintervalls und vergleichen diese mit der elektrischen Zeitkonstanten! Klar ist: je höher die Motordrehzahl, umso kürzer das Kommutierungsintervall. Zur Berechnung nehmen wir einen extremen Fall, die Leerlauf-Drehzahl bei Nennspannung n0. Die Anzahl der Kommutierungsintervalle pro Motorumdrehung ist sechs mal die Anzahl Polpaare p. Während einer Minute ergeben sich 6p ∙ n0 Kommutierungsschritte. Somit ist die Dauer eines Kommutierungsschritts ∆tcomm = (60 s/min)/(6p ∙ n0).
(ID:46004997)
:quality(80)/p7i.vogel.de/wcms/17/54/17544d1175fcf0b3db4915386d0b9588/0130896173v3.jpeg "Escon 2 kommt überall dort zum Einsatz, wo höchste Dynamik und Präzision gefragt sind – etwa in Anlagen zur Laborautomation. (Bild: DavidBGray/maxon)")
:quality(80)/p7i.vogel.de/wcms/94/19/941922d6fd5f9e18d23603434b1425a8/0127310246v2.jpeg "Gehäuselose Servomotoren lassen sich in beengten Platzverhältnissen sehr effizient einsetzen. (Bild: TQ-Group)")